Industrial robot path planning method and system based on pseudo-distance function
An industrial robot and path planning technology, applied in the field of robotics, can solve problems such as low RRT, inability to guarantee path quality, and large path differences, and achieve the effects of good path quality, excellent path, and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
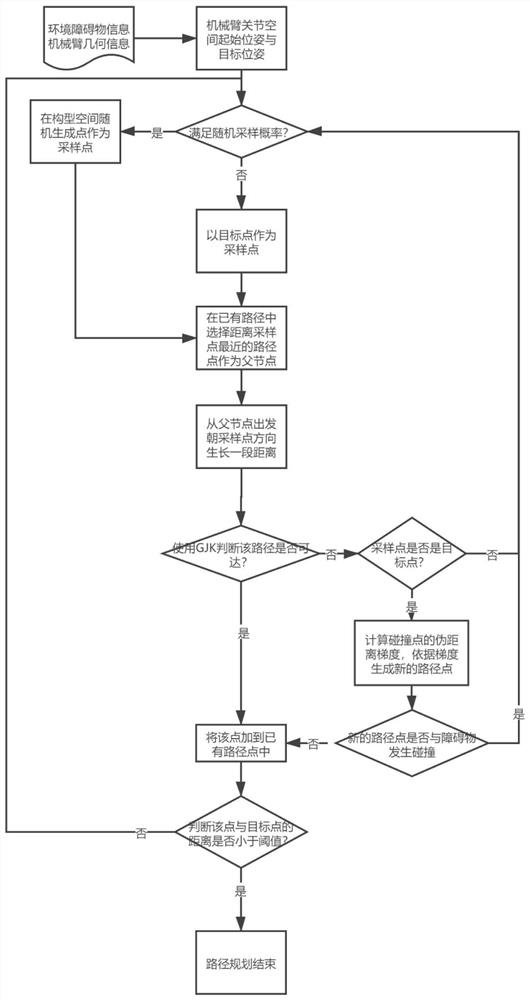
[0069] The object of the present invention is to provide a kind of fast, stable non-collision path generation method that is applicable to industrial manipulator, comprises the steps:
[0070] Step 1: Use a convex polyhedron to envelop obstacles and robotic arms;
[0071] Step 2: Input the starting point joint configuration θ star and the joint configuration θ of the target point goal ;
[0072] Step 3: Generate random points with a certain probability or use the target point as the sampling point θ sample , select the point closest to the sampling point among the existing path points as the parent node θ parent Grow a distance along the direction of the sampling point to generate a new path point θ new ;
[0073] Step 4: Discretize the path between the parent node and the new path point, and map the joint parameters of the joint space of the manipulator into the geometric shape of the workspace of the manipulator through the kinematic equation of the manipulator; use the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More