

Robot, repositioning method thereof, positioning device and storage medium
A robot and relocation technology, applied in the field of robotics, achieves the effects of fast computing speed, less resource occupation, and high feature extraction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
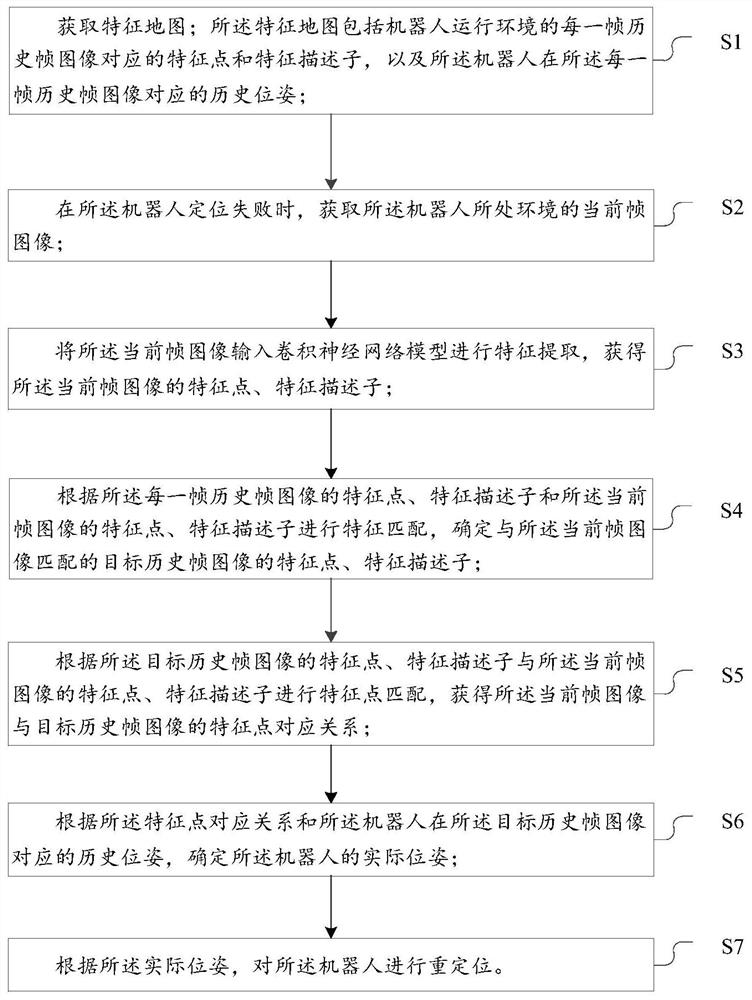
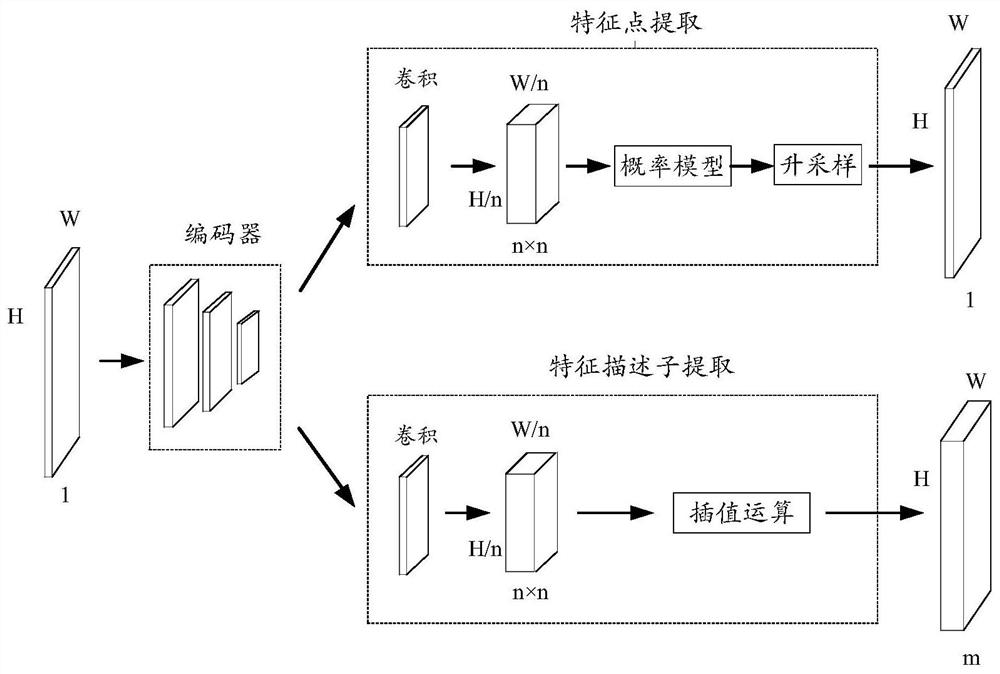
Method used
Image

Examples
Embodiment Construction
[0053] In order to enable those skilled in the technical field to which the application belongs to understand the application more clearly, the technical solutions of the application will be described in detail below through specific embodiments in conjunction with the accompanying drawings. Throughout the specification, unless otherwise specified, terms used herein should be understood as commonly used in the art. Therefore, unless otherwise defined, all technical and scientific terms used herein have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. In case of conflict, this specification shall take precedence. Unless otherwise specified, various equipment used in the present invention can be purchased from the market or prepared by existing methods.
[0054] Through further research, it is found that the failure of laser SLAM positioning is easy to appear in long corridors, garages, restaurants and other scenes. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More