A kind of manipulator unloading brick gripper and unloading method
A technology of manipulator and gripper, which is applied in the field of manipulator unloading brick gripper and brick unloading, which can solve the problems of large power stroke, product falling off, deformation, adhesion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments, but not as a basis for any limitation of the invention.
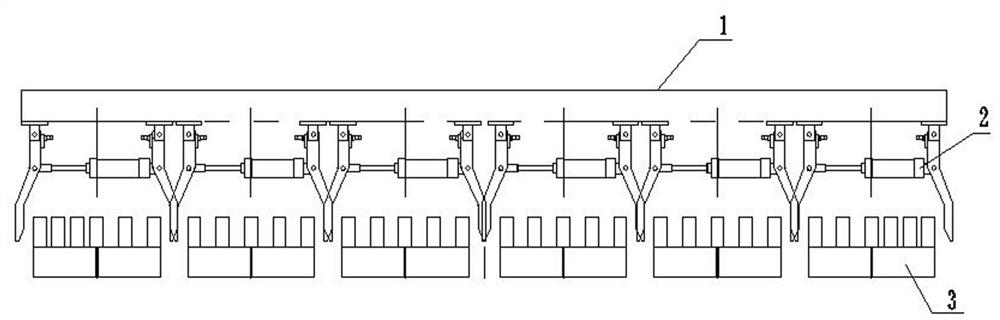
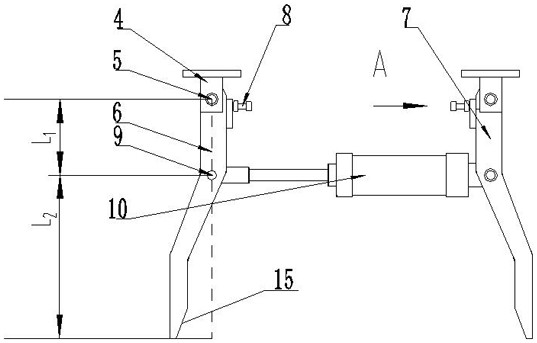
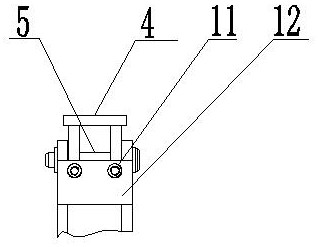
[0030] Referring to the drawings, a manipulator unloading brick gripper, installed on the unloading manipulator, used for the clamping of brick groups 3 on the brick stack, includes a plurality of swing claws arranged on the lower surface of the manipulator hanger 1 according to the brick stack Combination 2. A plurality of swing claw assemblies 2 are sequentially installed on the manipulator in the same direction to form a row of swing claw assemblies. The manipulator is provided with multiple rows of swing claw assemblies. Among the multiple rows of swing claw assemblies, at least two are a pair. They are clamped in two different positions on the same opposite side of the brick group. The swing claw combination 2 includes a swing claw I6, a swing claw II7 and two hinge supports 4. The u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More