

Unmanned obstacle avoidance method and terminal based on laser radar and GPS
A lidar, unmanned technology, applied in the direction of electromagnetic wave re-radiation, radio wave measurement system, utilization of re-radiation, etc., can solve the problems of economic loss, mission failure, limiting the use range and service life of unmanned vehicles, etc. , to achieve the effect of reducing avoidance and improving the efficiency of obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0082] Please refer to figure 1 , image 3 and 4 , Embodiment 1 of the present invention is:
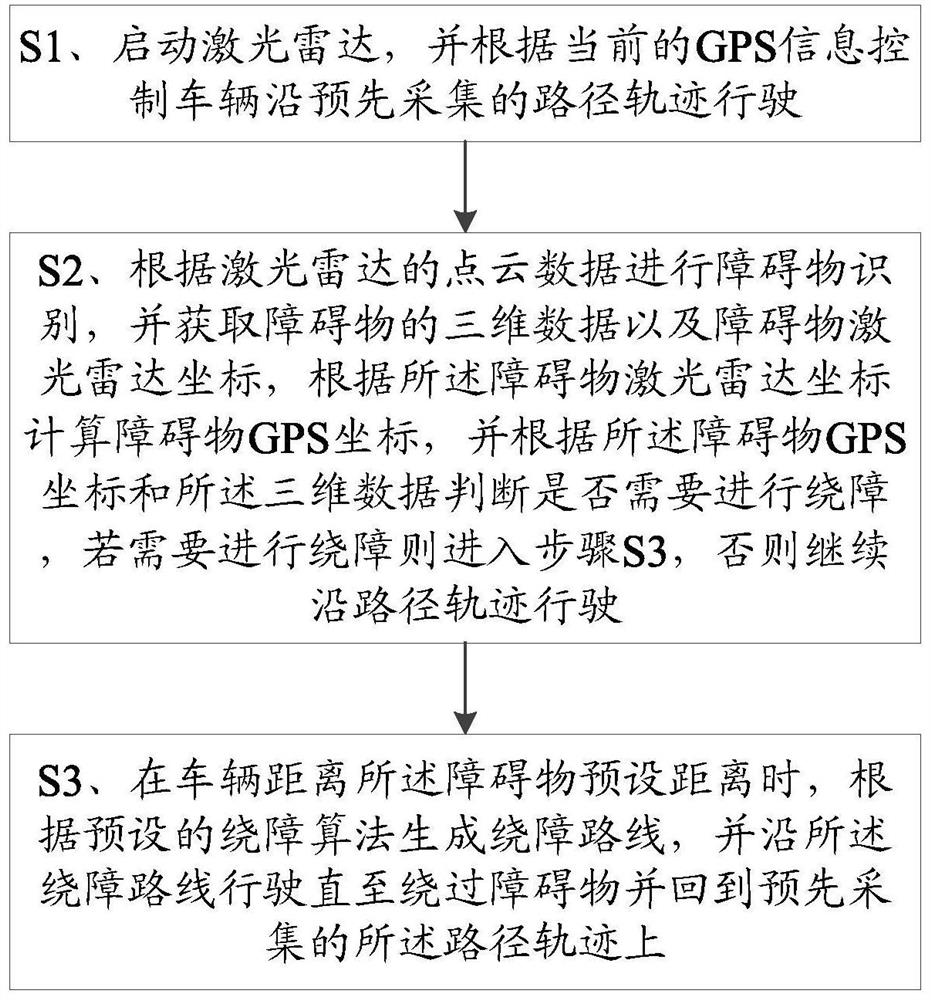
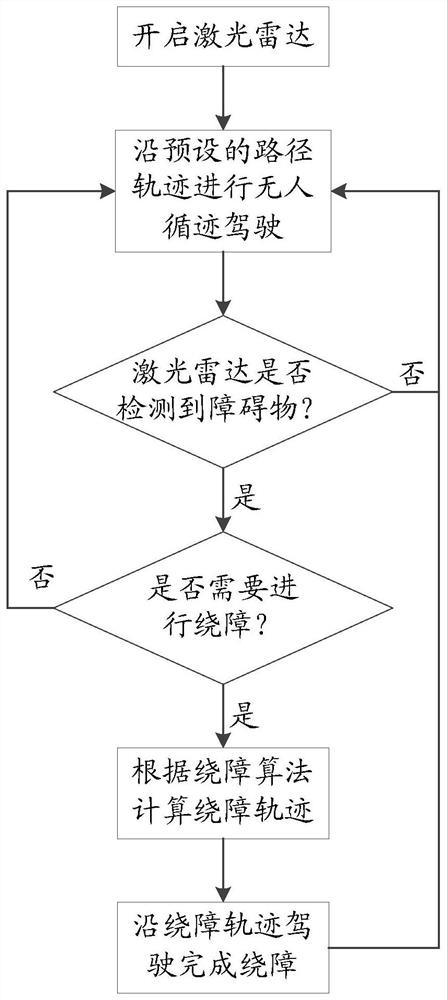
[0083] An unmanned driving obstacle avoidance method based on lidar and GPS, comprising:
[0084] S1, start the laser radar, and control the vehicle to drive along the pre-collected path track according to the current GPS information;
[0085] S2. Perform obstacle identification according to the point cloud data of the laser radar, and obtain the three-dimensional data of the obstacle and the laser radar coordinates of the obstacle, calculate the GPS coordinates of the obstacle according to the laser radar coordinates of the obstacle, and calculate the GPS coordinates of the obstacle according to the GPS coordinates of the obstacle and the three-dimensional data to judge whether it is necessary to circumvent the obstacle, if it is necessary to circumvent the obstacle, then enter step S3, otherwise continue to drive along the path track;
[0086] Wherein, in the step S2, the obsta...
Embodiment 2
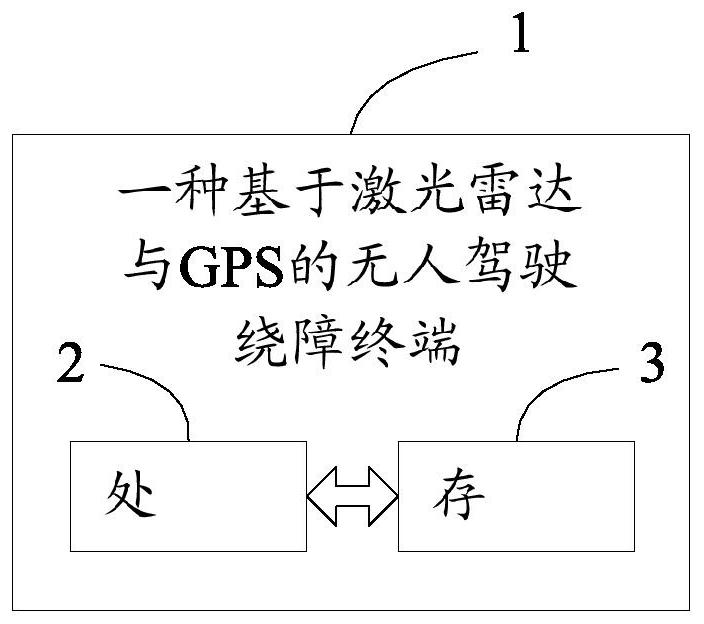
[0112] Please refer to figure 2 , the second embodiment of the present invention is:
[0113] An unmanned obstacle avoidance terminal 1 based on lidar and GPS, comprising a processor 2, a memory 3 and a computer program stored on the memory 3 and operable on the processor 2, the processor 2 executes the computer The program implements the steps in the first embodiment above.
[0114] To sum up, the present invention provides an unmanned driving obstacle avoidance method and terminal based on lidar and GPS. The GPS coordinates and three-dimensional data of obstacles are determined according to the lidar point cloud data, and the three-dimensional data are determined according to the lidar coordinates and three-dimensional data. Judging whether the obstacle will cause harm to the vehicle, so as to realize the automatic obstacle avoidance of the unmanned driving of the vehicle, and because the judgment is based on GPS coordinates and three-dimensional data, not only the locatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More