

Magnetic control capsule robot positioning method and system based on magnetic sensor array
A capsule robot and magnetic sensor technology, applied in the field of three-dimensional positioning, can solve the problems of interference and the inability to accurately obtain the magnetic field change information of the capsule robot, and achieve the effects of accurate acquisition, flexible spatial magnetic field changes, and improved spatial positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
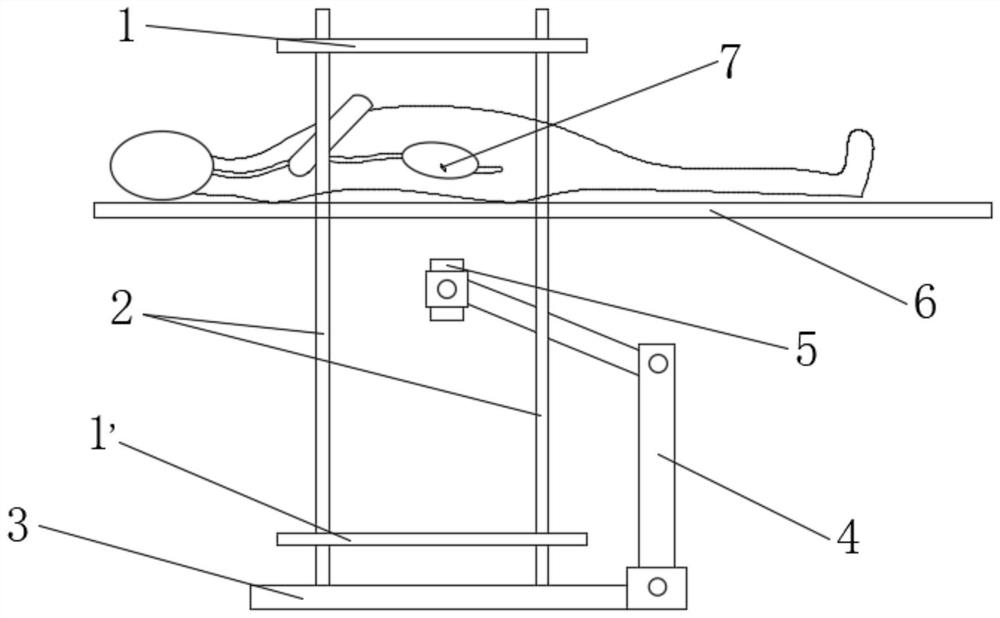
[0027] see Figure 1~2 , a magnetically controlled capsule robot positioning system based on a magnetic sensor array, including hardware equipment including a magnetically controlled capsule robot 7, an external permanent magnet 5, a mechanical arm 4, and a positioning device based on a magnetic sensor array; the end of the mechanical arm 4 is fixed An external permanent magnet 5 is installed, and a small-volume permanent magnet is embedded inside the magnetically controlled capsule robot 7;
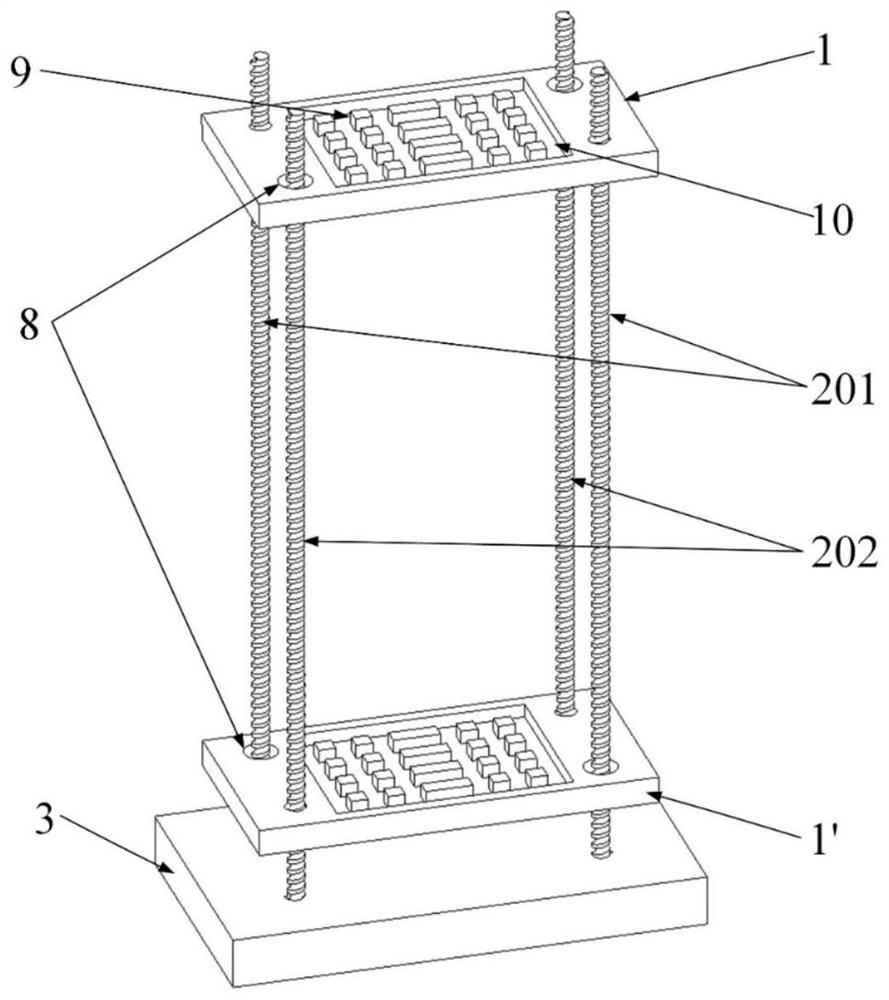
[0028] The positioning device based on the magnetic sensor array is composed of an upper magnetic sensor array disk 1, a lower magnetic sensor array disk 1', a lead screw 2, and a base 3. The upper magnetic sensor array disk 1 is located above the rotating hospital bed 6, and the The lower magnetic sensor array disk 1' is located below the rotating hospital bed 6, and the patient with the magnetically controlled capsule robot 7 lying in the body is lying on the rotating hospital bed 6. T...
Embodiment 2
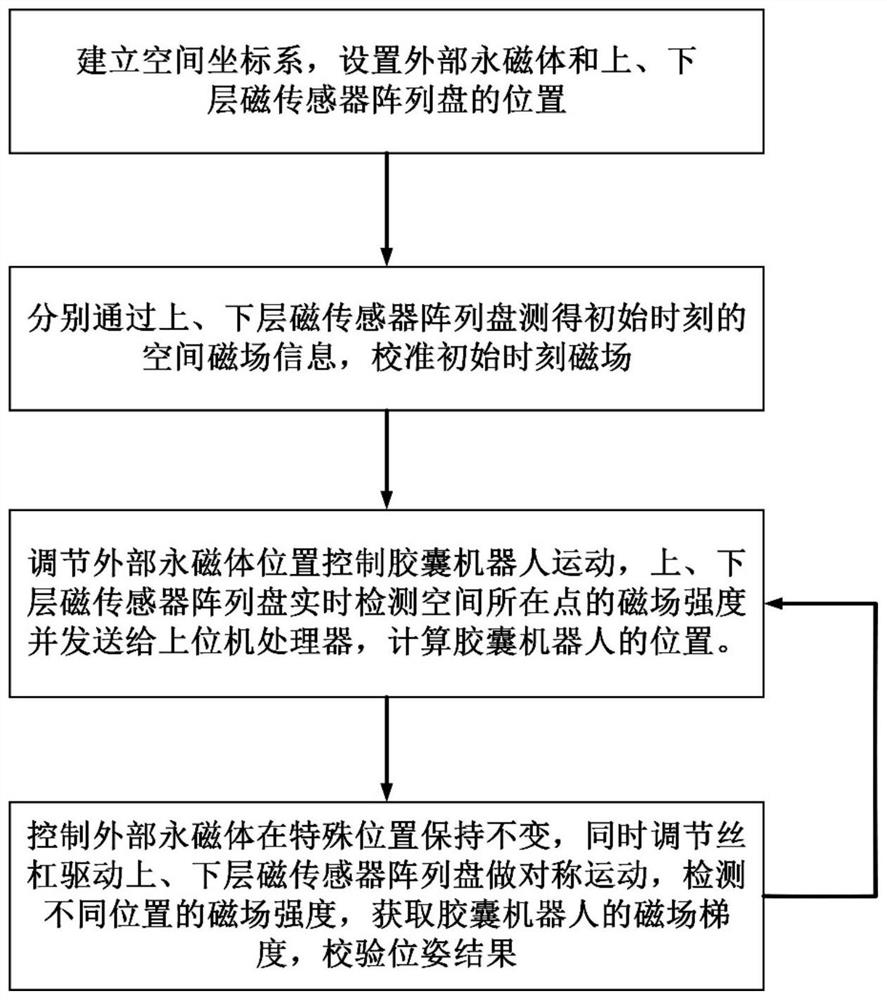
[0032] see image 3 , a positioning method of a magnetically controlled capsule robot positioning system based on a magnetic sensor array, the positioning method comprising the following steps:
[0033] First, establish a space coordinate system, set the external permanent magnet 5 at the coordinates of the origin, adjust the positions of the upper magnetic sensor array disk 1 and the lower magnetic sensor array disk 1' respectively, so that the two magnetic sensor array disks are separated by the external permanent magnets. 5. The plane of motion is distributed symmetrically up and down in the center;
[0034] Second, the spatial magnetic field information at the initial moment is measured respectively through the upper magnetic sensor array disk 1 and the lower magnetic sensor array disk 1 ', and the information includes the magnetic field of the earth and the magnetic field of the external permanent magnet 5;
[0035]Third, adjust the position of the external permanent mag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More