

A method for real-time planning of obstacle avoidance path for omnidirectional mobile robot based on grid method
A mobile robot and omnidirectional mobile technology, which is applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve the problems of seldom considering the whole process of engineering practice, inaccessibility near obstacles, lack of ride comfort, etc., to achieve saving The effect of removing dynamic solution, reducing path length, good real-time and fault tolerance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
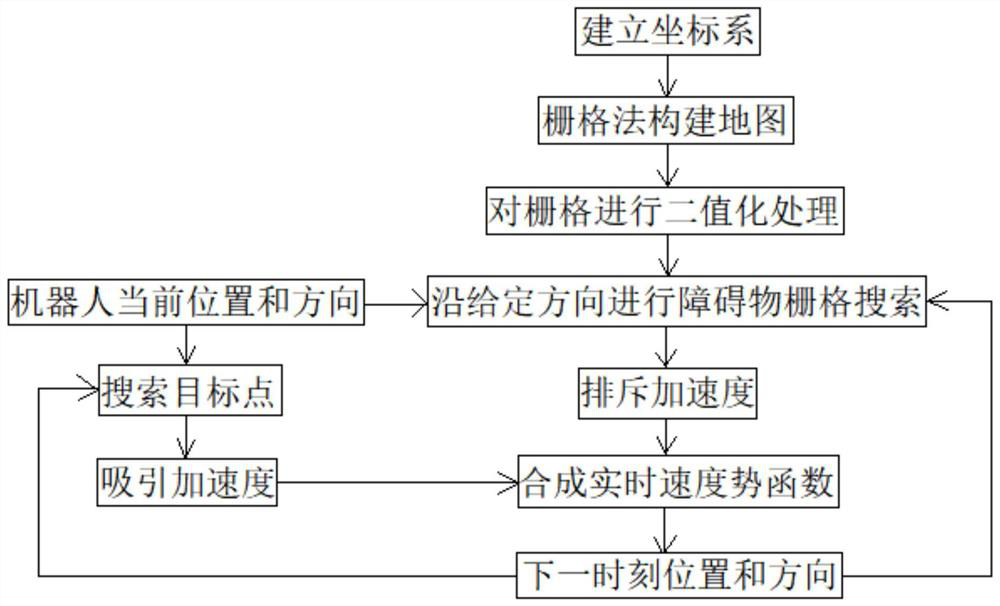
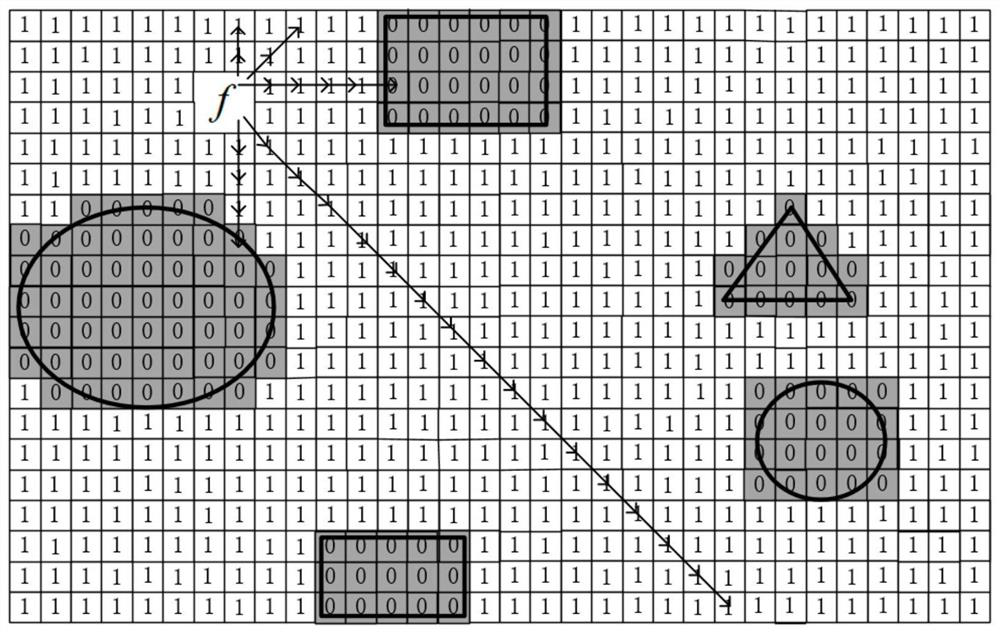
[0078] In this embodiment, within a working range of 50m*50m, the grid is divided by a density of 500*500, and tests are carried out for different obstacle conditions. The specific test steps are shown in S1-S7.
[0079] The test conditions, initial value settings, and final test results of this embodiment are as follows:
[0080] 1) Test conditions (specific parameter selection):
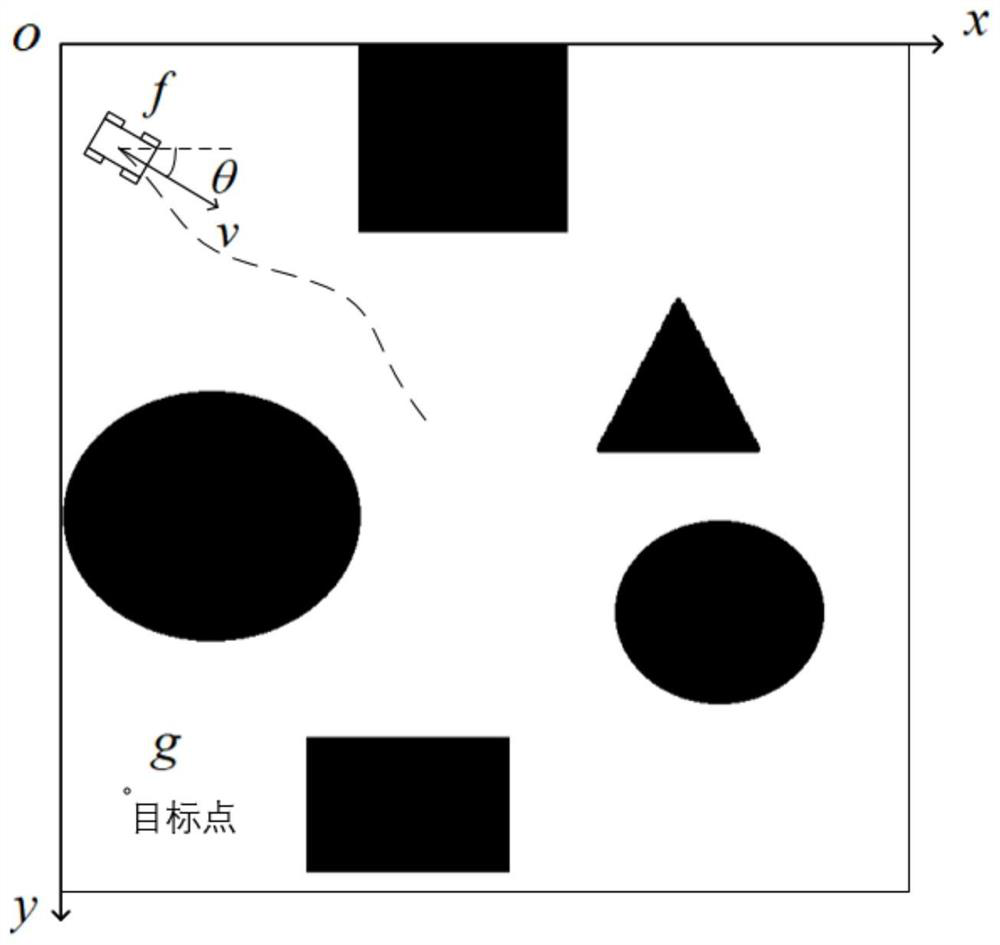
[0081] Robot size: 0.1m*0.1m;
[0082] Obstacle size: according to the actual obstacle shape;
[0083] Attractive potential and repulsive potential influence scaling factor: 300000;
[0084] Degree of attraction and repulsion: 3;
[0085] Minimum safe distance of obstacles: 0.5m;
[0086] The maximum speed of the robot: 0.1m / s;
[0087] The maximum output angular velocity of the robot: pi / 18rad / s;
[0088] The maximum speed increment of the robot: 0.1m2 / s;
[0089] The minimum speed increment of the robot: 0.005m2 / s;
[0090]2) Initial value setting:
[0091] Robot initial position coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More