Unmanned aerial vehicle shooting distance semi-automatic optimization method based on image information entropy
A technology of shooting distance and image information, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve problems such as optimal shooting distance without bridge targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
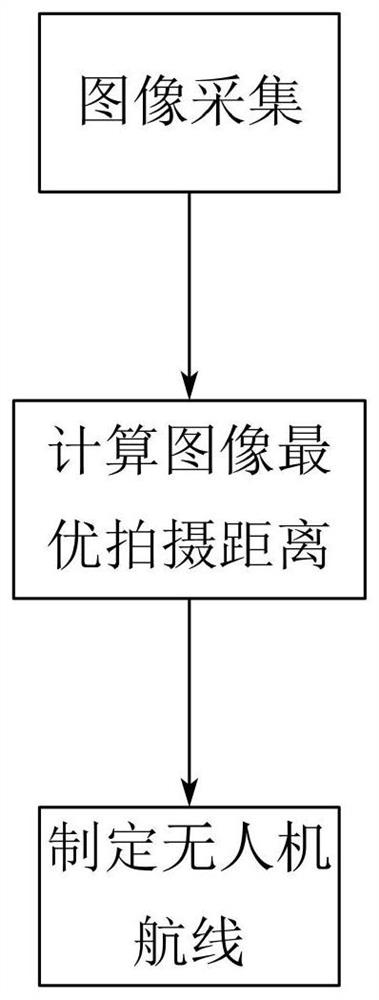
[0027] Such as figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 As shown, this embodiment discloses a semi-automatic optimization method for shooting distance of unmanned aerial vehicles based on image information entropy. The method includes the following steps:
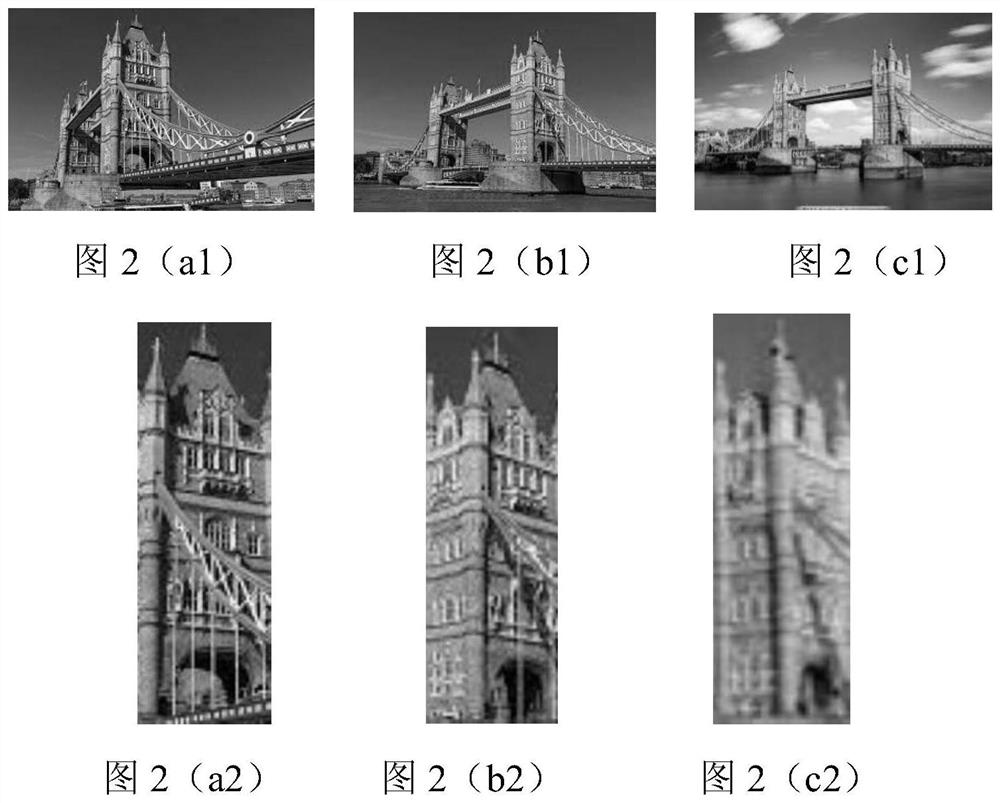
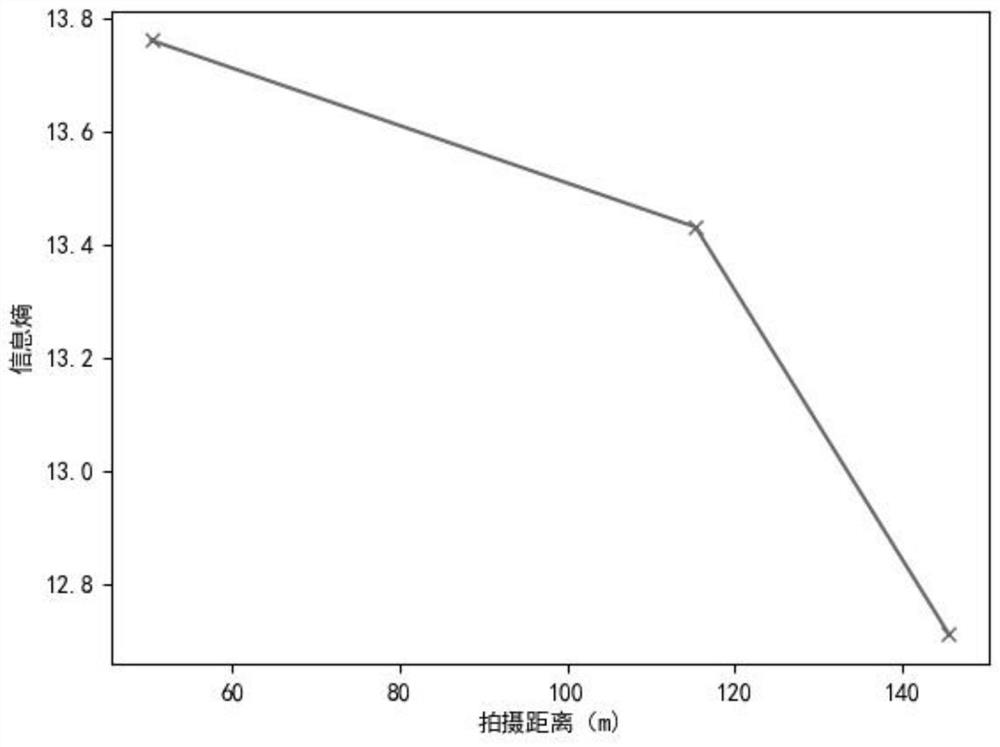
[0028] S1. Shoot target images of bridge towers at different distances through the camera on the drone. While shooting the target images of bridge towers, use the laser ranging module on the drone to record the distance from the shooting point to the target. figure 2 (a1), figure 2 (b1), figure 2 (c1) is an example of the original picture at different shooting distances of 50.31m, 115.36m, and 145.65m; Figure 4 (a1), Figure 4 (b1), Figure 4 (c1) is an example of the original picture at different shooting distances of 85.65m, 317.34m, and 450.61m.
[0029] In step S1, different shooting points should be kept on the same straight line as much as possible.
[0030] S2. Calculate the optimal dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com