A Decentralized Adaptive Tracking Control Method Based on Extreme Learning Machine
An extreme learning machine and self-adaptive tracking technology, applied in self-adaptive control, general control system, control/regulation system, etc., can solve problems such as slow speed, cumbersome repeated differential operation process of virtual controller, complexity explosion, etc., to achieve Good calculation efficiency, avoiding the effect of complexity explosion problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
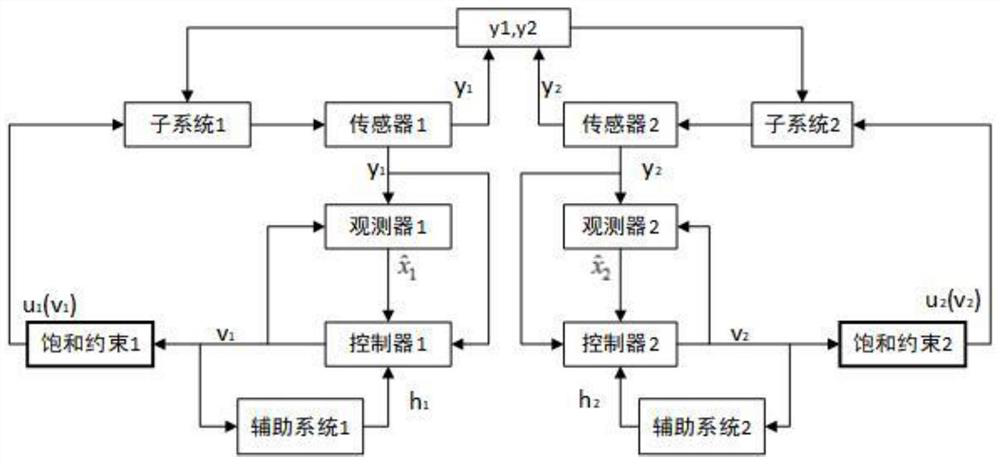
[0066] refer to figure 1 , which is the first embodiment of the present invention, provides a distributed adaptive tracking control method based on an extreme learning machine, specifically including:
[0067] S1: Based on the uncertain nonlinear interconnected system of N subsystems, the interconnected system model is established by using the approximation principle of the extreme learning machine. It should be noted that the uncertain nonlinear interconnection system of N subsystems includes:
[0068]
[0069]
[0070]
[0071] the y i =x i,1
[0072] Where, i=1,...,N, l=2,...,n i -1, respectively represent the state and output of the i-th subsystem, f i,l ( ) represents an unknown smooth nonlinear function, H i,l ( ) represents the unknown interconnection between subsystems, which is also a smooth function, v i is the controller input to be designed, u i ( ) represents the system control input affected by the saturation nonlinearity;
[0073]
[0074]...
Embodiment 2
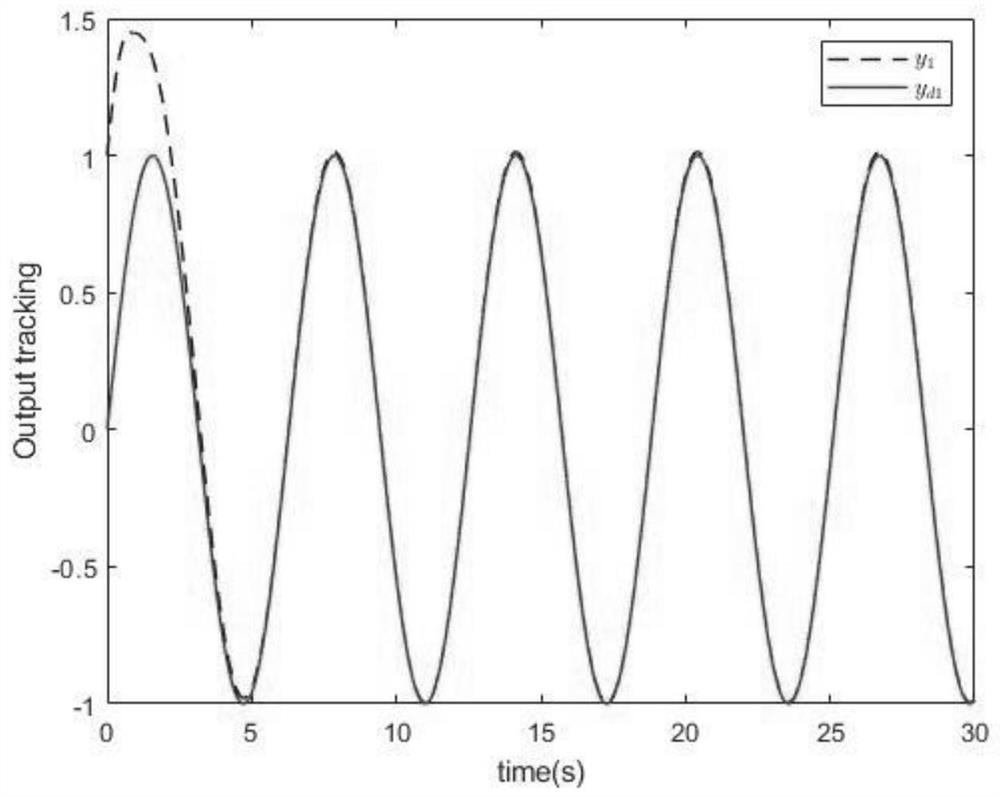
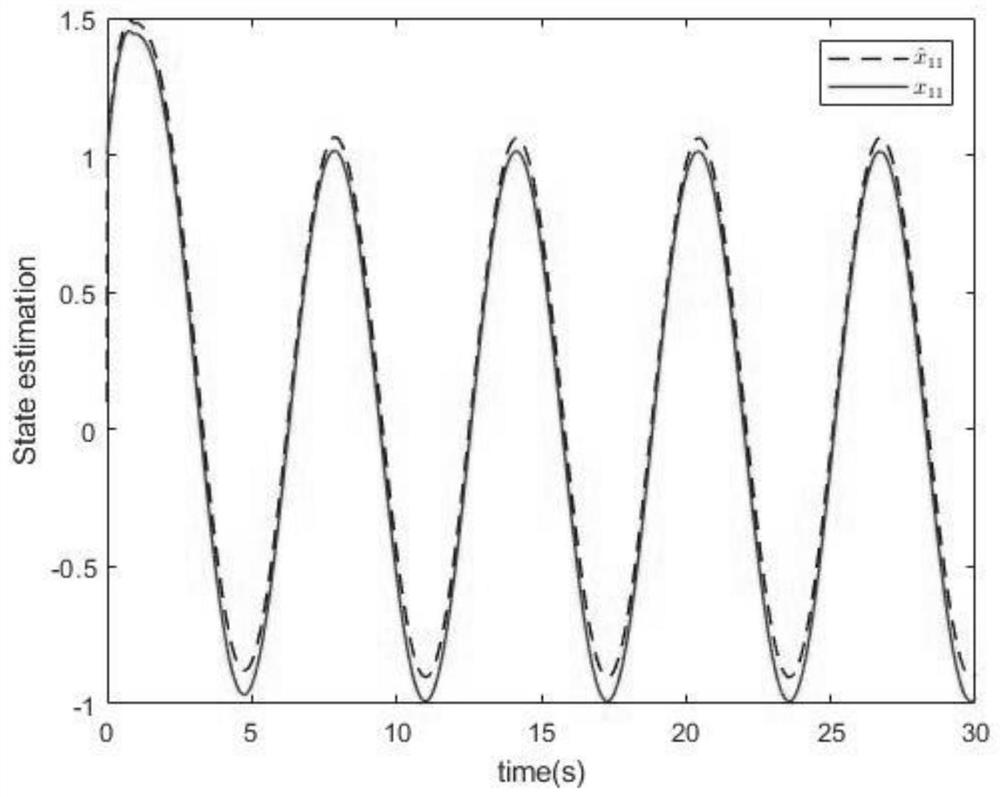
[0121] refer to Figure 1 to Figure 11 , which is the second embodiment of the present invention. What this embodiment is different from the first embodiment is that it provides an experimental test of a decentralized adaptive tracking control method based on extreme learning machines, which specifically includes:
[0122] In this embodiment, in order to verify the stability of the controller provided in Embodiment 1, this embodiment uses Lyapunov stability analysis theory to verify the effectiveness of the controller of the present invention, as follows,
[0123] For all interconnected systems, define the Lyapunov function:
[0124]
[0125] Derivation of the above formula can get
[0126]
[0127]
[0128] It can be obtained from the above formula that the defined Lyapunov function is eventually uniformly bounded, the system model used in the present invention is stable, and the controller designed in the present invention is effective.
[0129] In this embodiment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com