

Multi-constraint self-adaptive control method for motor-driven manipulator
A self-adaptive control, motor-driven technology, applied in the direction of self-adaptive control, comprehensive factory control, general control system, etc., to achieve the effect of improving real-time performance, good adaptability and high control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
Embodiment 2
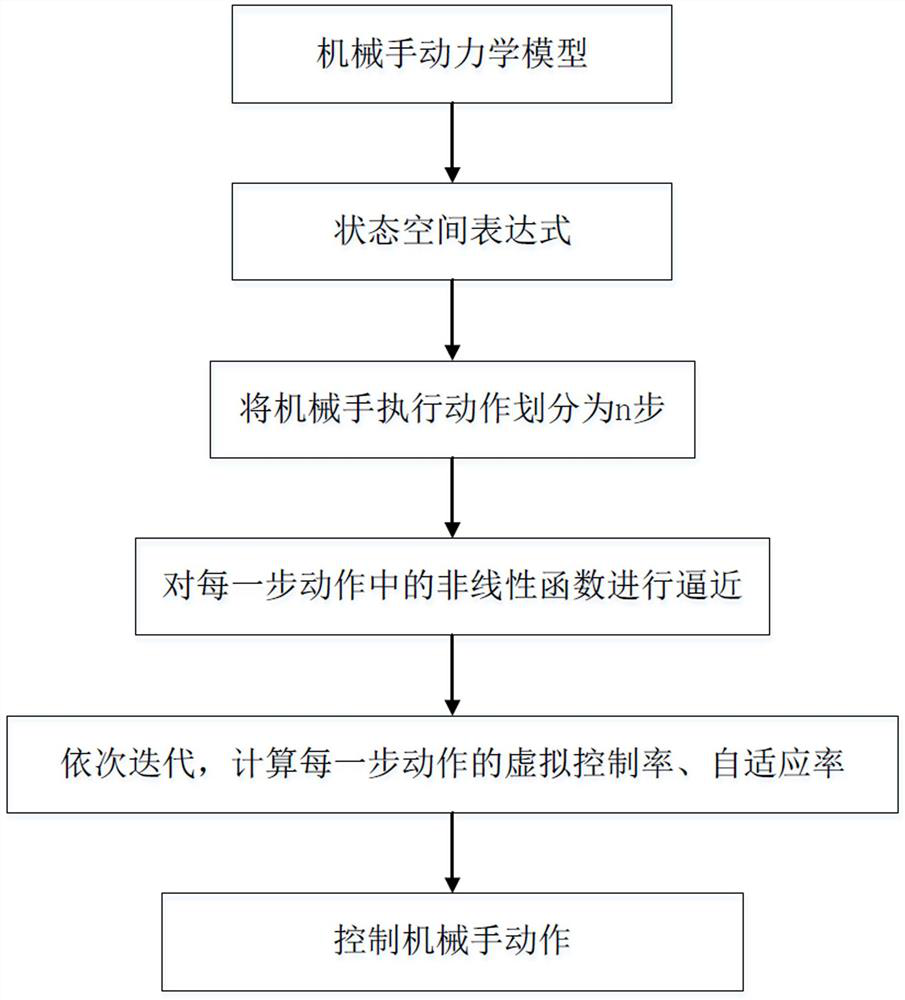
A multi-constraint adaptive control method for a motor-driven manipulator, on the basis of Embodiment 1, the state space expression of the manipulator in this embodiment is:
In the formula, x 1 , x 2 , x 3 are state variables; respectively x 1 , x 2 , x 3 the derivative with respect to time; , respectively x 2 , x 3 The state estimate of ; y Output trajectory for the manipulator; t is a time variable; u ( v ) is the control input voltage; θ is the rotational angular velocity of the manipulator, is the angular velocity of the manipulator at the next moment, I Input current for the manipulator; f 2 ( ), g 2 ( ), f 3 ( ), g 3 ( ) are all functions of arbitrary independent variables; means that the independent variable is The function f 2 ( ); means that the independent variable is The function g 2 ( ); means that the independent variable is The function f 3 ( ); means that the independent variable is The f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More