

A multi-constraint adaptive control method for a motor-driven manipulator
An adaptive control and motor drive technology, applied in adaptive control, comprehensive factory control, general control system, etc., to achieve the effect of small calculation, avoid complexity explosion, and improve real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
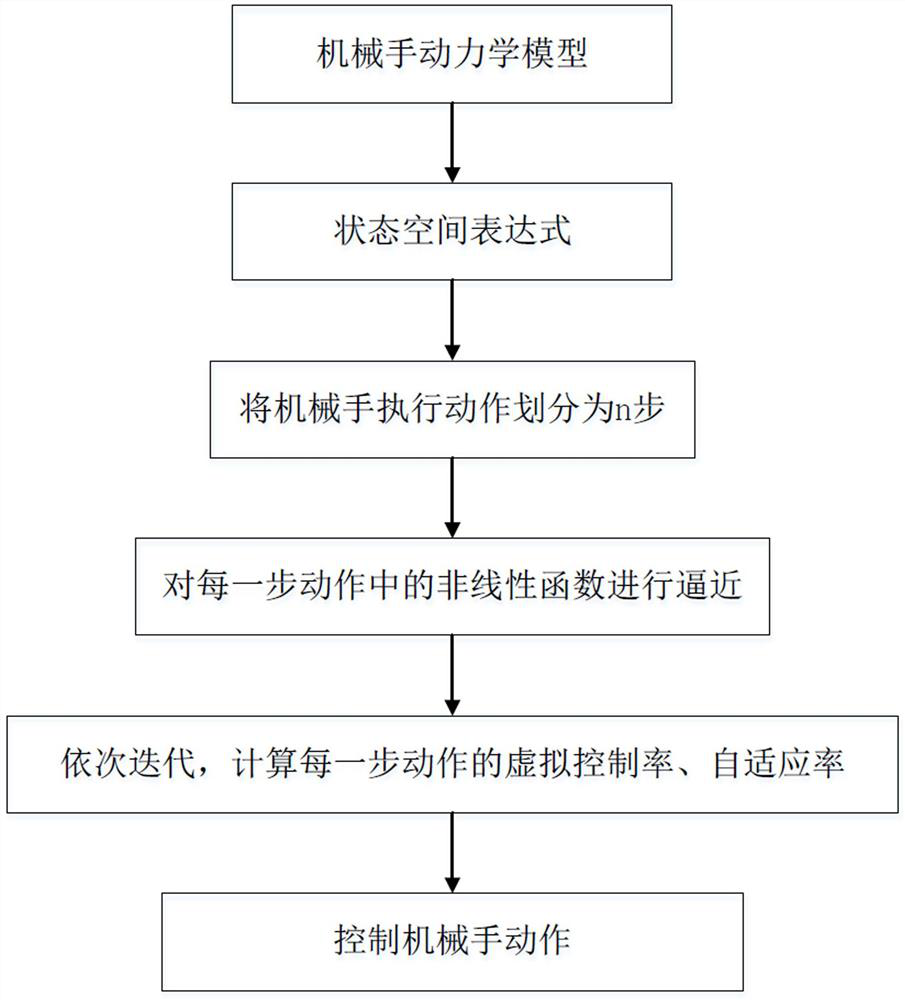
[0119] like figure 1 A multi-constraint adaptive control method of a motor-driven manipulator is shown, including:
[0120] A dynamic model of the manipulator is established, and the uncertain part in the dynamic model is integrated with the derivative of the inversion virtual control law to obtain a state space expression;
[0121] Based on the state space expression, the manipulator execution actions are divided into n step;
[0122] The nonlinear function in each step is approximated by Mamdani fuzzy system;
[0123] Iterate in turn to calculate the virtual control rate and adaptive rate of each step action;
[0124] with the first n The virtual control rate and the adaptive rate of the step are used as the actual adaptive control output signal, and the action of the manipulator is controlled by the actual adaptive control output signal.
Embodiment 2
[0126] A multi-constraint adaptive control method for a motor-driven manipulator, on the basis of Embodiment 1, the state space expression of the manipulator in this embodiment is:
[0127]
[0128]
[0129]
[0130]
[0131]
[0132] In the formula, x 1 , x 2 , x 3 are state variables; respectively x 1 , x 2 , x 3 the derivative with respect to time; , respectively x 2 , x 3 The state estimate of ; y Output trajectory for the manipulator; t is a time variable; u ( v ) is the control input voltage; θ is the rotational angular velocity of the manipulator, is the angular velocity of the manipulator at the next moment, I Input current for the manipulator; f 2 ( ), g 2 ( ), f 3 ( ), g 3 ( ) are all functions of arbitrary independent variables; means that the independent variable is The function f 2 ( ); means that the independent variable is The function g 2 ( ); means that the independent variable is The function ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More