Time stamp-based vehicle teleoperation time delay control method
A control method and time stamping technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of inability to guarantee system operability and transparency, difficulty in designing control observers, and system stability reduction, etc. problem, to achieve the effect of excellent spectral resolution performance, convenient modeling, and simple model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
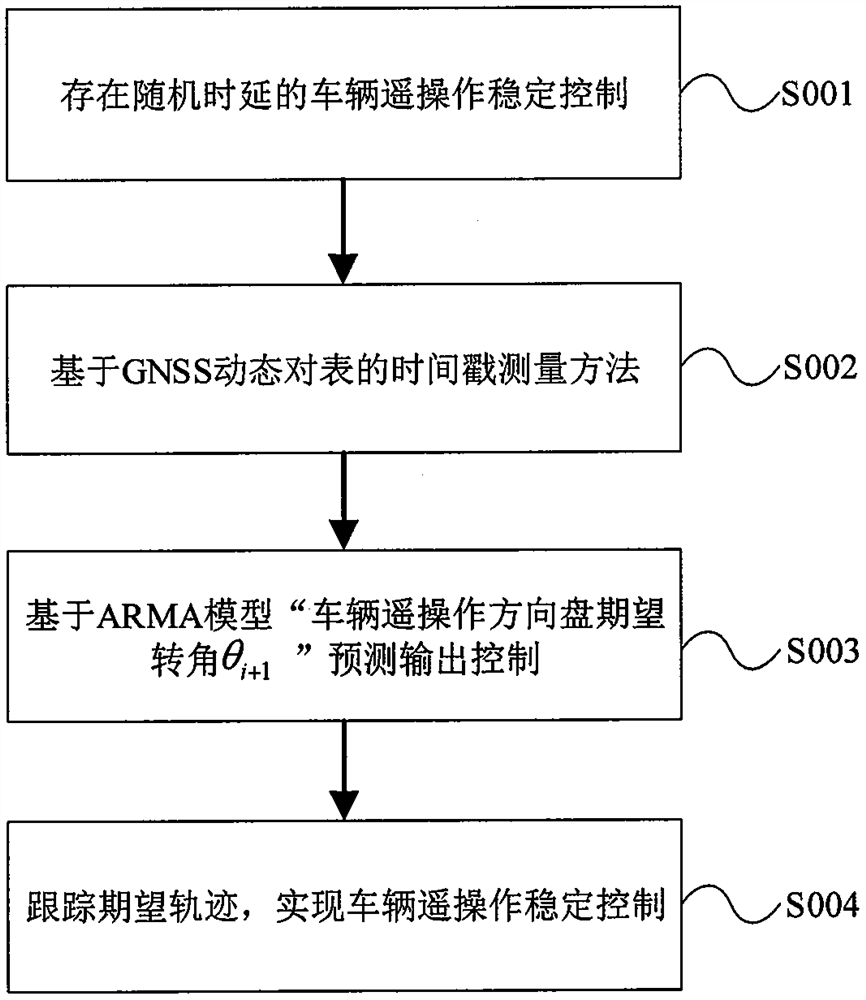
[0055] see figure 1 , the present invention specifically includes steps as follows:
[0056] Step 1: The master terminal obtains satellite time information T based on GNSS 1 , as the standard time information to calibrate the local time, the master end will time information T 1 Send it to the slave as a timestamp together with the control message;
[0057] Step 2: Obtain satellite time information T based on GNSS from the terminal 2 , as the standard time information to calibrate the local time, the slave receives the control message and parses the time stamp T in the control message 1 ;
[0058] Step 3: Calculate the specific random delay time ΔT=T 2 -T 1 ;
[0059] Step 4: Delay time ΔT measured according to the time stamp and "actually measured rotation angle of the vehicle teleoperation steering wheel" θ i Time series of ARMA model modeling;
[0060] Step 5: Set the "measured rotation angle of the steering wheel of the remote operation of the vehicle" to θ i A ti...
Embodiment 2
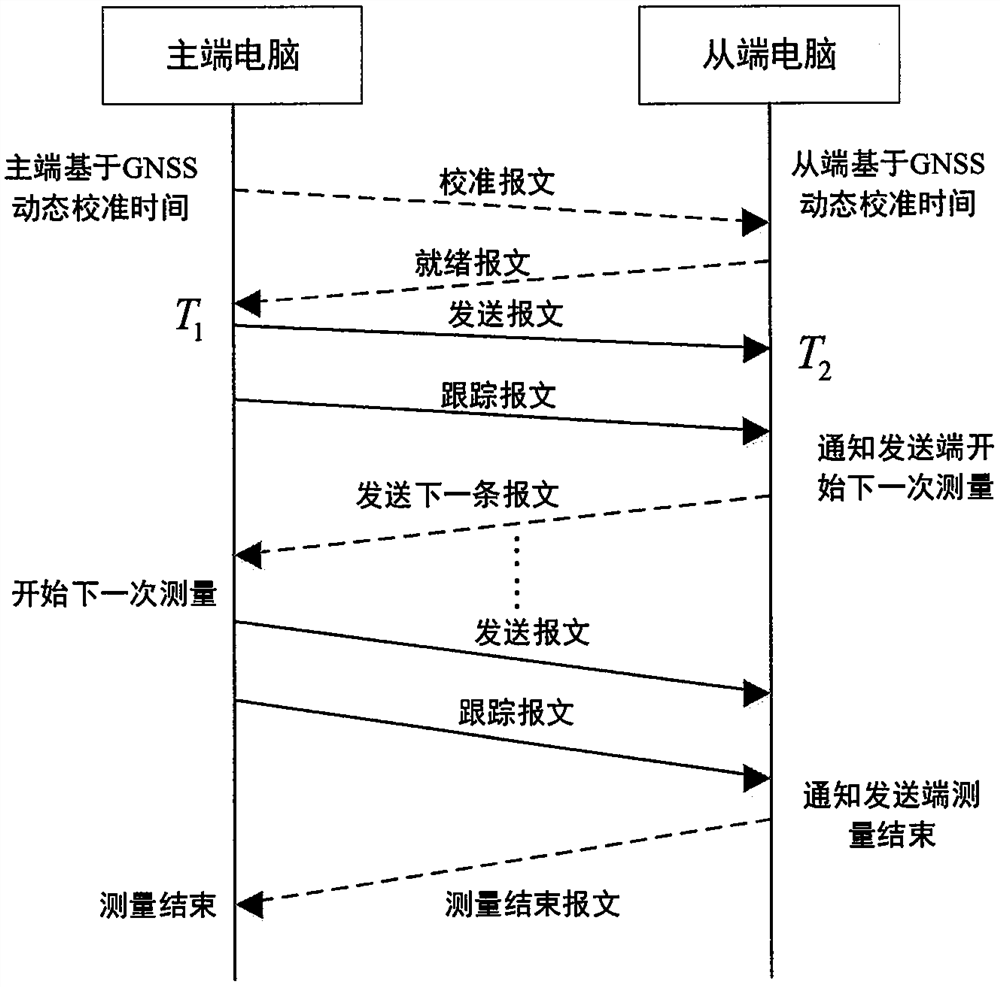
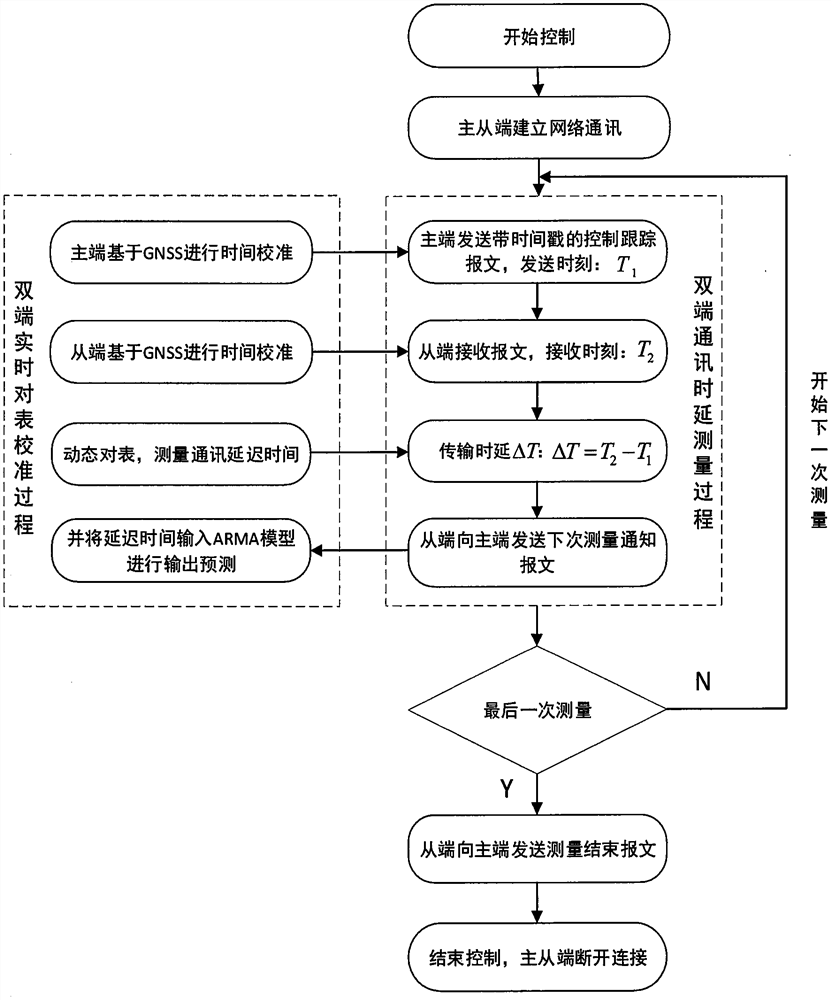
[0063] see figure 2 and image 3 , in the present invention, " based on GNSS dynamic time stamp measurement to table " method, it is characterized in that:
[0064] Step ①: The master terminal obtains satellite time information T based on GNSS 1 , as the standard time information to calibrate the local time, and set T 1 as a timestamp;
[0065] Step ②: Send by the master end with time stamp T 1 the control message to the slave;
[0066] Step ③: After network communication transmission, the slave receives the control message and parses the time stamp T in the control message 1 ;
[0067] Step ④: Obtain satellite time information T based on GNSS from the terminal 2 , as the standard time information to calibrate the local time;
[0068] Step ⑤: Calculate the delay time ΔT=T 2 -T 1 , after the delay measurement is over, the slave end sends a response message to the master end that has completed the time stamp measurement.
Embodiment 3
[0070] see Figure 4 , in the present invention, based on the ARMA model, the "desired rotation angle θ of the vehicle teleoperation steering wheel i+1 "Predictive output control, characterized by:
[0071] Select "Vehicle Teleoperation Steering Wheel Actual Measured Rotation Angle" θ i A time series of length p+1 {θ i , θ i-1 , θ i-2 ,...,θ i-p}(i-p>0), input to the expected steering angle predictor of the vehicle direction based on the ARMA model, "the expected steering wheel angle of the vehicle teleoperated steering wheel" θ i+1 Expressed as,
[0072] θ i+1 = β 1 θ i +β 2 θ i-1 +β 3 θ i-2 +…+β p θ i-p +Z t (1)
[0073] Among them, β 1 , β 2 , β 3 ,...,β p is the parameter of the autoregressive model, Z t is the delay error of the teleoperation network communication,
[0074] Z t =ΔT i -α 1 ΔT i-1 -α 2 ΔT i-2 -...-α q ΔT i-q (2)
[0075] Among them, α 1 , α 2 ,...,α q is the parameter of the moving average model, {ΔT i , ΔT i-1 , ΔT i...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap