Robot control system with gesture sensing demonstrators
A technology of a control system and a teach pendant, applied in the field of gesture sensing, can solve the problems of low gesture recognition accuracy, robot misoperation, robot error, etc., so as to avoid directly executing wrong commands and improve the accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
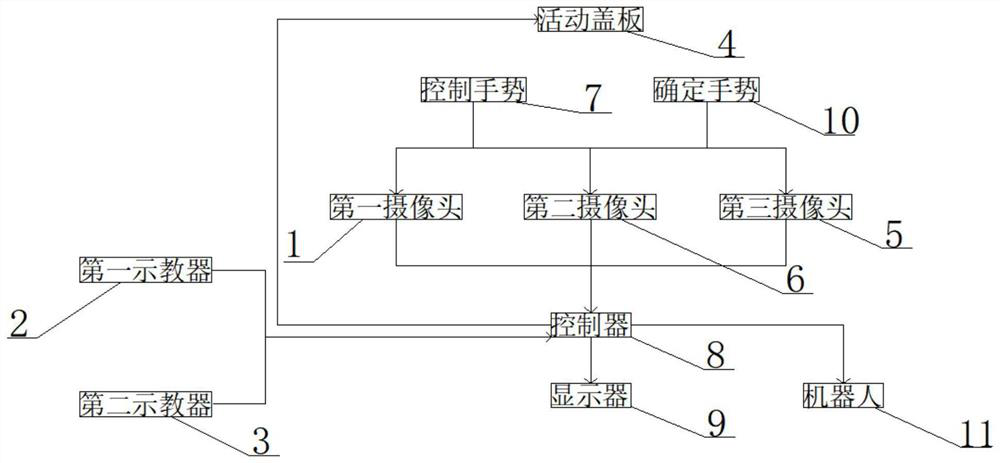
[0021] See figure 1 The present invention provides a technical solution: a robot control system having a gesture sensing instrument, including a first instrument 2, a second instrument 3, a control gesture 7, and a determination gesture 10, the first The signal output end of the teachings 2 and the second era 3 is connected to the signal input terminal of the controller 8, and the signal output of the controller 8 is input to the active cover plate 4, the display 9, and the robot 11 signal input. The end is connected, the control gesture 7 and the signal output terminal of the gesture 10 are connected to the first camera 1, the second camera 6, and the signal input terminal of the third camera 5, the first camera 1, the second camera 6 The signal output terminal of the third camera 5 is connected to the signal input terminal of the controller 8, wherein the external display gesture performs the input command for the first instrument 2 and the second instrument 3, and passes the co...
specific Embodiment 2
[0023] See figure 1 The present invention provides a technical solution: a robot control system having a gesture sensing instrument, including a first instrument 2, a second instrument 3, a control gesture 7, and a determination gesture 10, the first The signal output end of the teachings 2 and the second era 3 is connected to the signal input terminal of the controller 8, and the signal output of the controller 8 is input to the active cover plate 4, the display 9, and the robot 11 signal input. The end is connected, the control gesture 7 and the signal output terminal of the gesture 10 are connected to the first camera 1, the second camera 6, and the signal input terminal of the third camera 5, the first camera 1, the second camera 6 The signal output terminal of the third camera 5 is connected to the signal input terminal of the controller 8, wherein the external display gesture performs the input command for the first instrument 2 and the second instrument 3, and passes the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More