Trajectory tracking control method for variable-centroid automatic guided vehicle
An unmanned guided vehicle and trajectory tracking technology, which is applied in non-electric variable control, vehicle position/route/height control, control/adjustment system, etc., can solve the problems of poor accuracy of unmanned guided vehicle trajectory tracking control, and achieve improvement Accuracy, the effect of reducing position error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be further described below with reference to the accompanying drawings. The following examples are for more clearly explaining the technical solutions of the present invention without limiting the scope of the invention.
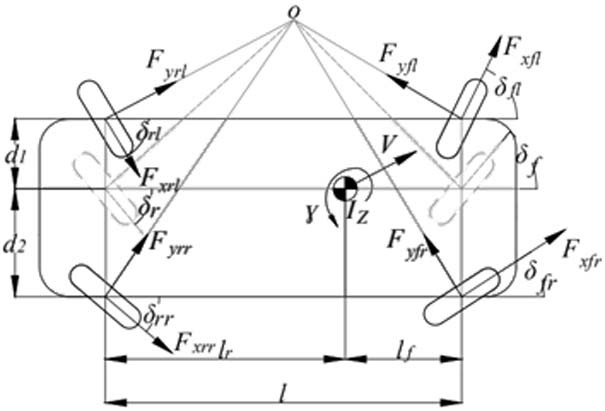
[0072] like figure 1 As shown, the dynamic modeling of the unmanned handling vehicle is mainly determined by the lateral movement and yawthrough, so the body model is required to consider the longitudinal movement along the X-axis, the landscape of the Y-axis Sports and hook around the Z axis. The dynamic model established for the controller's predictive model is simplified based on the vehicle kinetic process to reduce the amount of control algorithm. The following ideal assumptions are performed when the vehicle dynamics is modeled. Suppose the no-handed car is driving on a flat pave, ignoring the vertical movement of the vehicle; only considering the pure side partial tire characteristics, ignores the coupling relationship be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More