

AGV path planning method and system based on reinforcement learning
A path planning and reinforcement learning technology, applied in control/adjustment systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc. Effects with low requirements and high generalizability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
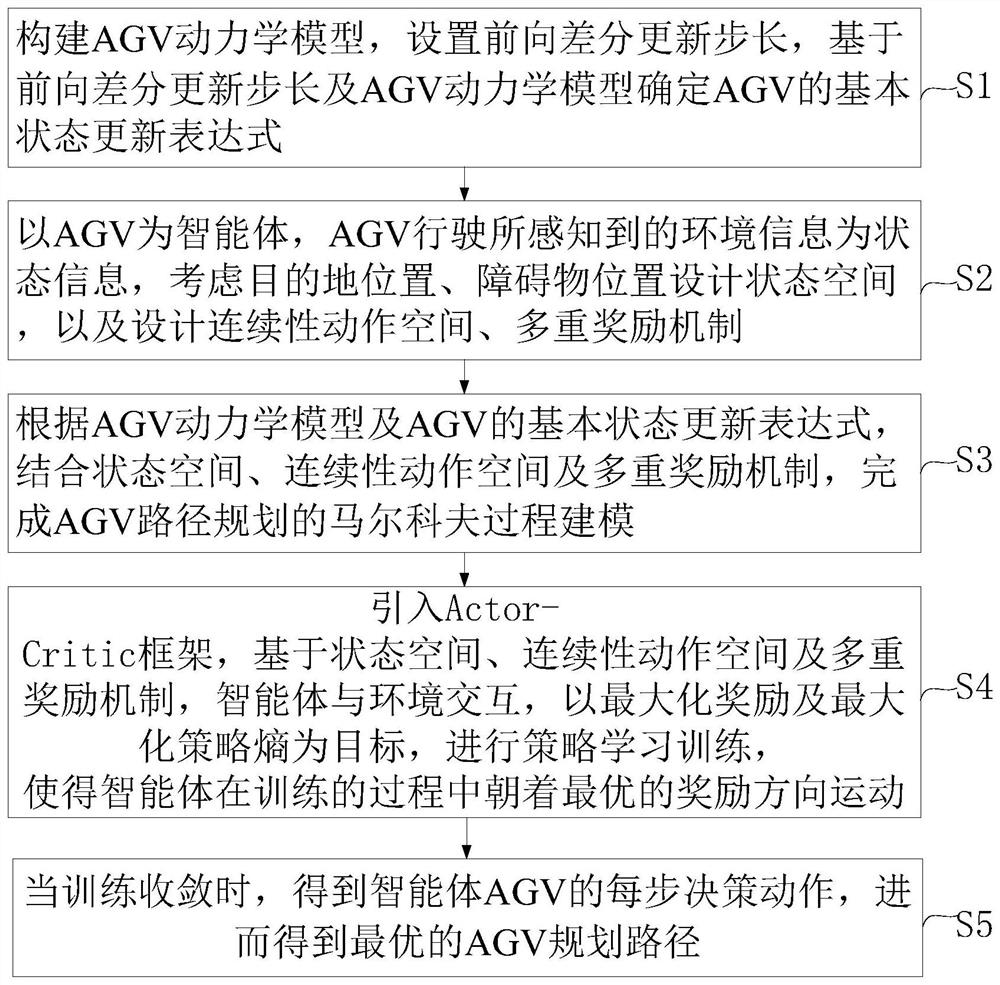
[0091] like figure 1 As shown, in this embodiment, a flow diagram of an AGV path planning method based on reinforcement learning is proposed, see figure 1 , the method includes:
[0092] S1. Construct the AGV dynamic model, set the forward differential update step size, and determine the basic state update expression of the AGV based on the forward differential update step size and the AGV dynamic model;
[0093] Considering that reinforcement learning depends on the interaction between the agent and the environment, in multiple trials and errors, combined with a reasonable reward mechanism, the policy learning of the current scene is carried out. After the training converges (generally refers to the entire trajectory of each AGV interacting with the environment The obtained reward value converges), but directly collecting interactive data in the real environment will cause a large loss to the AGV. Therefore, a simulation model that can reflect the real AGV state change is ne...
Embodiment 2
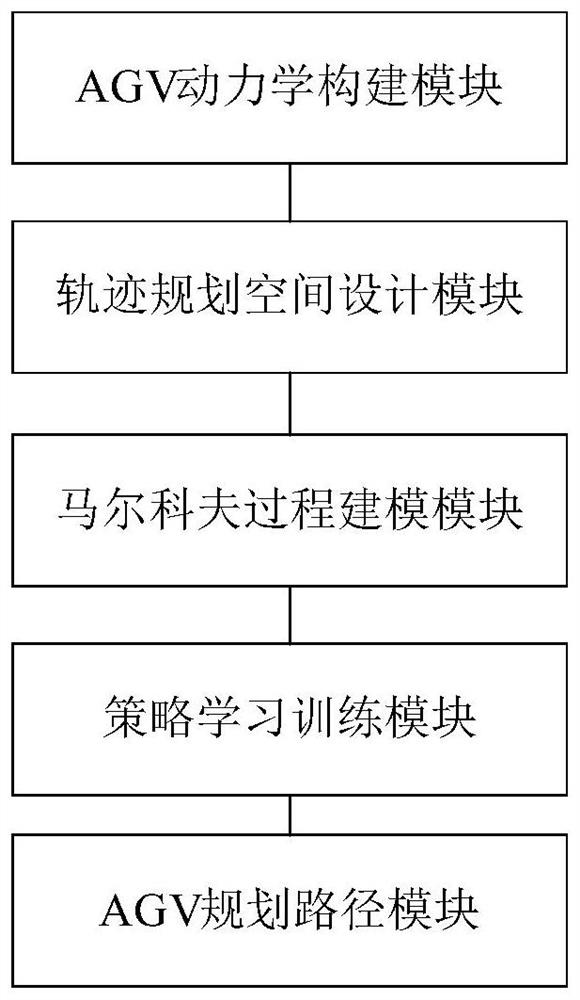
[0197] like image 3 As shown, the application also proposes an AGV path planning system based on reinforcement learning, which is used to implement the AGV path planning method, see image 3 , the system includes:
[0198] The AGV dynamics building block is used to construct the AGV dynamics model, set the forward differential update step size, and determine the basic state update expression of the AGV based on the forward differential update step size and the AGV dynamics model;
[0199] The trajectory planning space design module uses the AGV as the agent, and the environmental information perceived by the AGV as the state information, and considers the destination position and obstacle position to design the state space, as well as the continuous action space and multiple reward mechanisms;
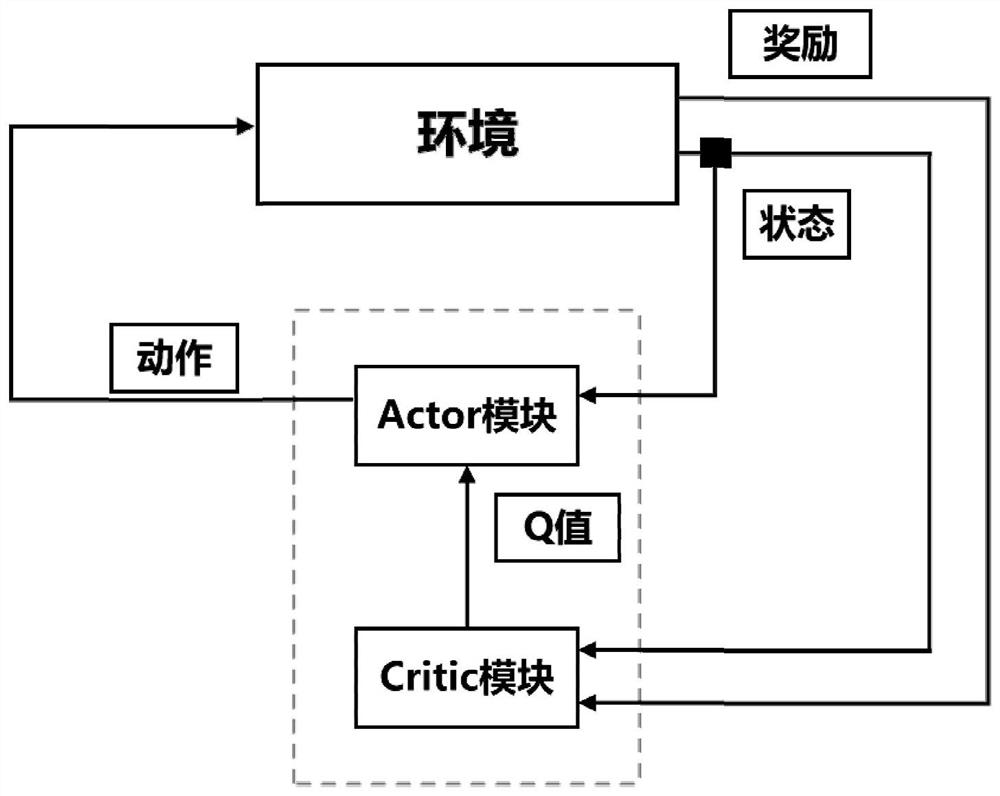
[0200] The Markov process modeling module, based on the AGV dynamic model and the basic state update expression of the AGV, combines the state space, continuous action space and mult...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More