Method and device for determining accuracy of calibration results among multiple laser radars
A laser radar and accuracy technology, applied in the field of sensors, can solve problems such as inability to understand the accuracy of calibration results conveniently and accurately, and point cloud data cannot be well integrated, and achieve the effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
[0048] The method for determining the accuracy of calibration results among multiple laser radars according to an embodiment of the present invention is used to determine the accuracy of calibration results among multiple vehicle-mounted multi-line laser radars.
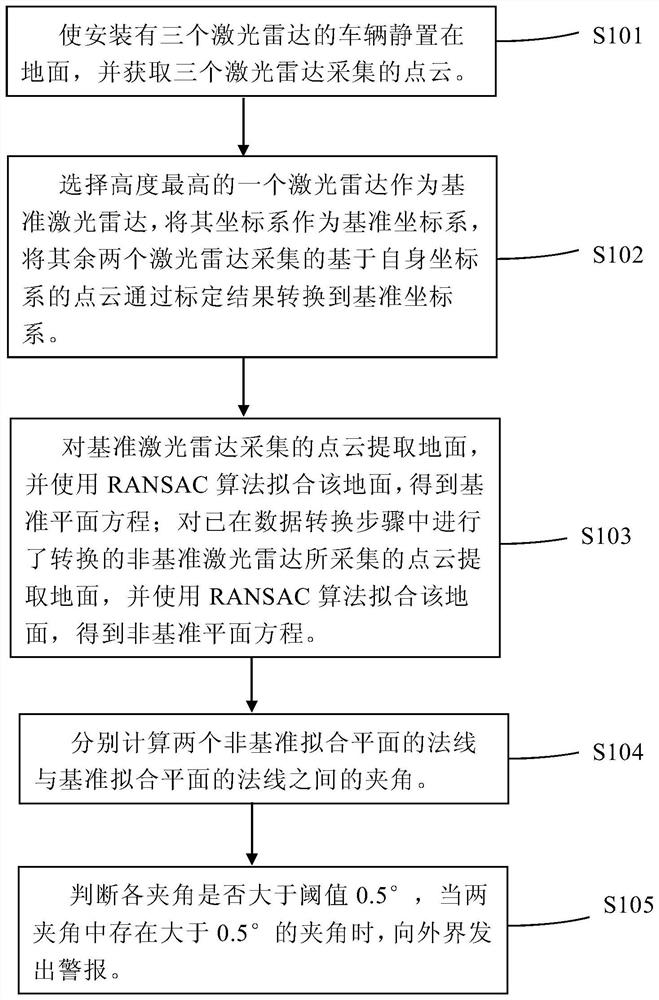
[0049] figure 1 Represents a method for determining the accuracy of calibration results between multiple laser radars according to an embodiment of the present invention, such as figure 1 As shown, the method for determining the accuracy of the calibration results among multiple laser radars according to an embodiment of the present invention achieves the effect of expressing the accuracy of the calibration results simply and intuitively with numerical values.
[0050] exist figure 1 The illustrated method for determining the accuracy of the calibration results between multiple laser radars according to an embodiment of the present invention includes a data acquisition step S101, where a vehicle equipped with multip...
Deformed example 1
[0078] According to the fitting plane fitted by point cloud data in a single frame, there will be great errors in judging the quality of the calibration results, and it is easily affected by unexpected situations, resulting in errors in the accuracy of the determined calibration results, etc. .
[0079] As an improvement of the first embodiment of the present invention, in the data acquisition step, multiple frames of point cloud data collected by multiple laser radars are obtained, and a fitting plane is obtained by the same laser radar according to each frame of point cloud data. That is, each lidar fit has multiple (the amount corresponding to the number of frames) fitting planes.
[0080] Since there are multiple fitting planes according to the point cloud data obtained by each lidar, the content in each frame will be compared between the normal of the two non-reference fitting planes and the normal of the reference fitting plane. Between the lines, two angles are formed....
no. 2 approach
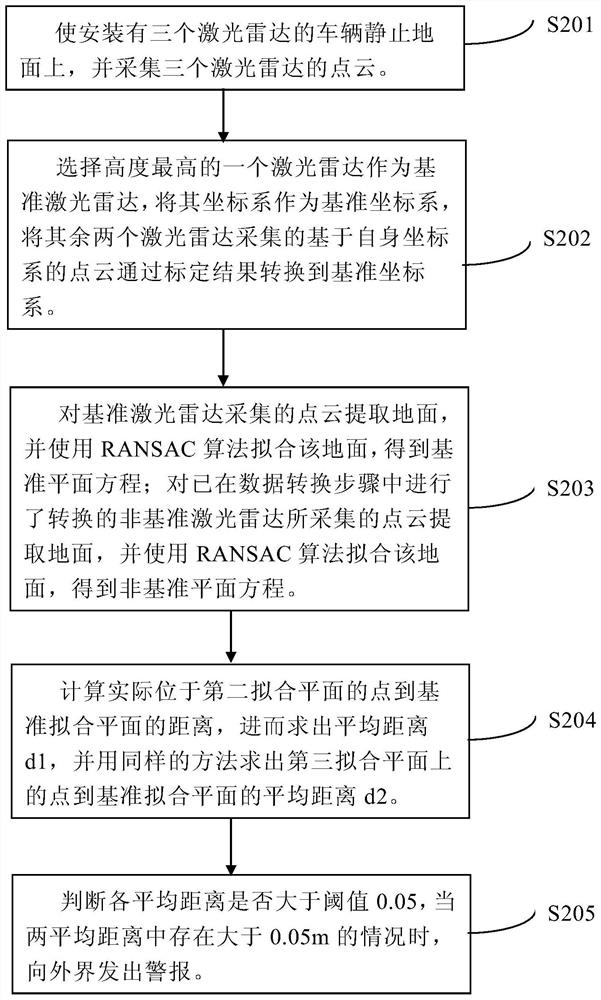
[0084] The difference between the second embodiment of the present invention and the above-mentioned first embodiment is that in the calculation step S204, the point in the non-reference plane in the point cloud data obtained by the non-reference lidar is calculated using the distance formula from the point to the plane The distance to the datum fitting plane, and then find the average distance of these distances. The size of the average distance represents the difference between the non-reference fitting plane and the reference fitting plane, so the average distance is used to represent the accuracy of the calibration result. The other steps (data acquisition step S201, data conversion step S202, and fitting step S203) are the same as those in the first embodiment, so descriptions thereof are omitted.
[0085] In the calculation step of this embodiment, in the calculation step S204, the points actually located on the second fitting plane (A2X+B2Y+C2Z+D2=0) are calculated resp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More