

Unmanned system cluster control method based on behavior tree
A behavioral and clustering technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of lack of support for large-scale heterogeneous unmanned system clusters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS
[0051] In order to make the objects, technical solutions, and advantages of the present invention more clearly, the technical solutions in the embodiments of the present invention will be described in contemplation in the embodiment of the present invention. It is an embodiment of the invention, not all of the embodiments. Based on the embodiments of the present invention, those of ordinary skill in the art will belong to the scope of the present invention in the scope of the present invention without making creative labor premises.
[0052] In order to understand the basic concept of behavioral trees, the following principles and designs of traditional behavioral trees are briefly introduced.
[0053] 1) Overview of the behavior tree
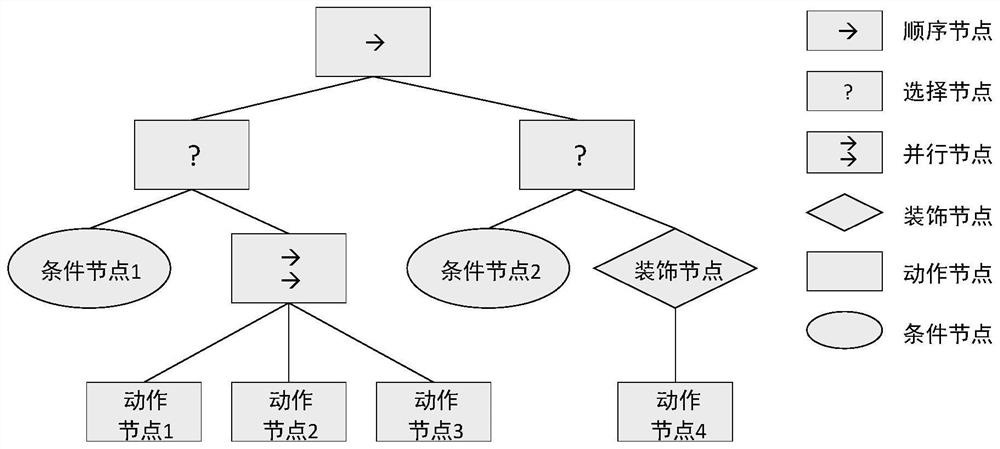
[0054] In terms of form, the behavior tree is a toxic tree structure, wherein the internal node is referred to as a control node, and the leaf node is called an execution node. For relation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More