

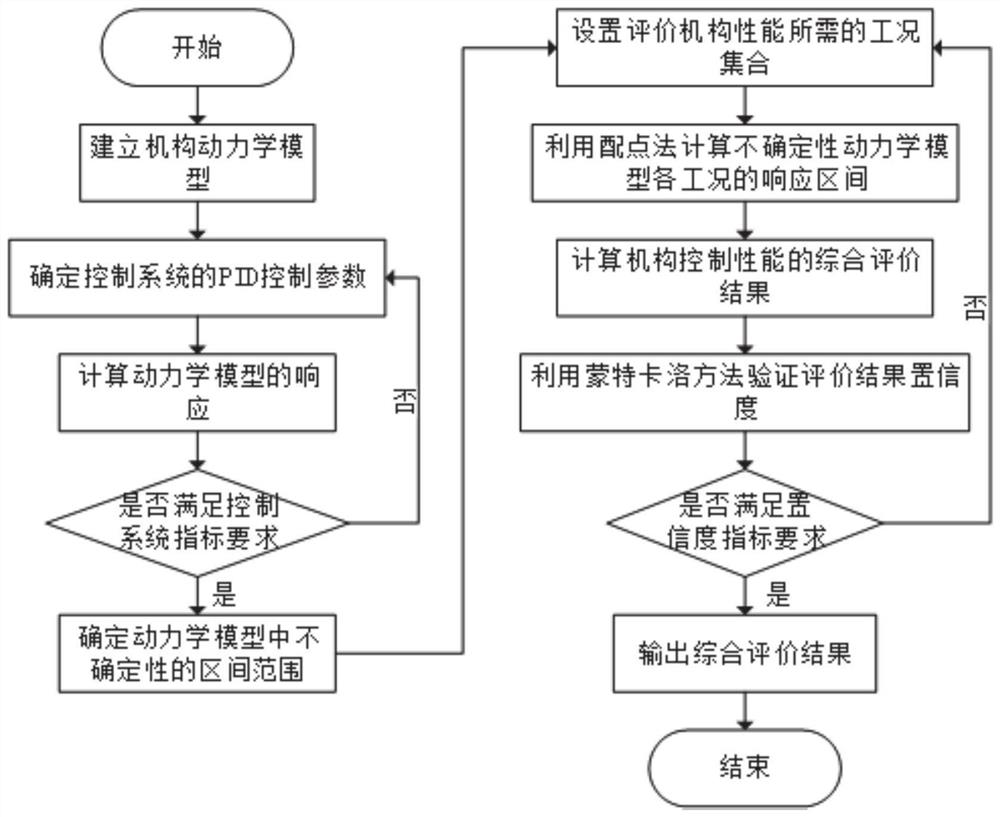
PID control performance comprehensive evaluation method considering uncertainty
A control performance and comprehensive evaluation technology, applied to controllers with specific characteristics, electric controllers, etc., can solve problems such as difficult to reflect the level of mechanism control performance, and achieve the effect of improving credibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
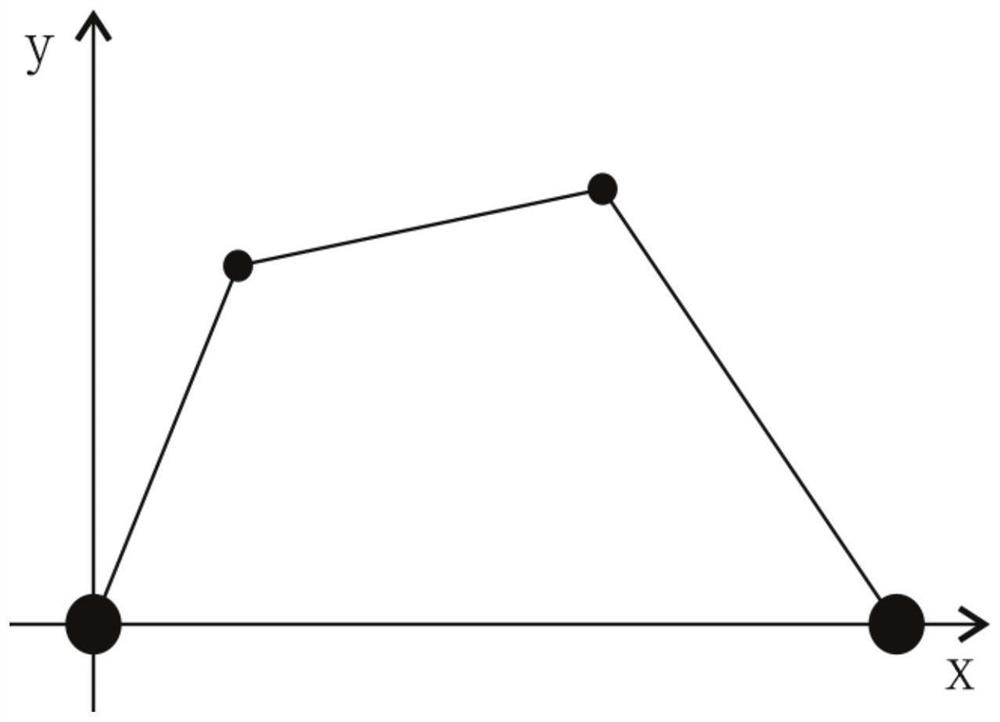
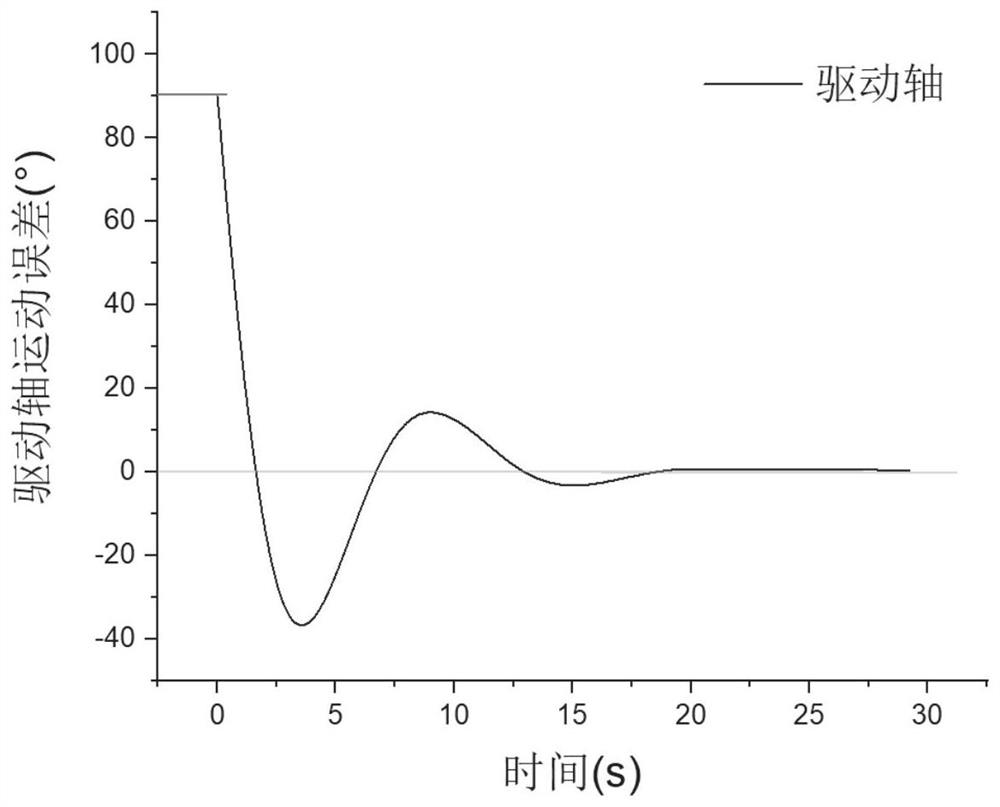
[0054] Such as figure 2 As shown, it is a planar four-bar linkage mechanism with a single degree of freedom. Axis 1 is the driving shaft, on which driving torque is applied. The lengths of the connecting rods are 55mm, 73mm, 135mm and 145mm respectively, and the mass of each connecting rod is m=1kg , the moment of inertia is 0.01kgm 2 . The operating condition is that axis 1 rotates 90°, and the angular response of mechanism axis 1 is as follows image 3 As shown, the motion error of the planar four-bar linkage mechanism gradually decreases with the movement process, and the angle of the axis 1 of the planar four-bar linkage mechanism gradually tends to the target value. The gain in the system controller is obtained through the iterative optimization calculation of the sequential quadratic programming algorithm The coefficient is: K P =5.13,K I =1.81, K D = 0.83.
[0055] To further introduce uncertainty into the mechanism system, the length and mass of each rod in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More