

Multi-vehicle path planning method for closed, dense network type and automatic logistics park
A logistics park and route planning technology, applied to road network navigators, measuring devices, instruments, etc., can solve the problems of angle optimization, high computational complexity, etc., and achieve high flexible vehicle control, high density, and low cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
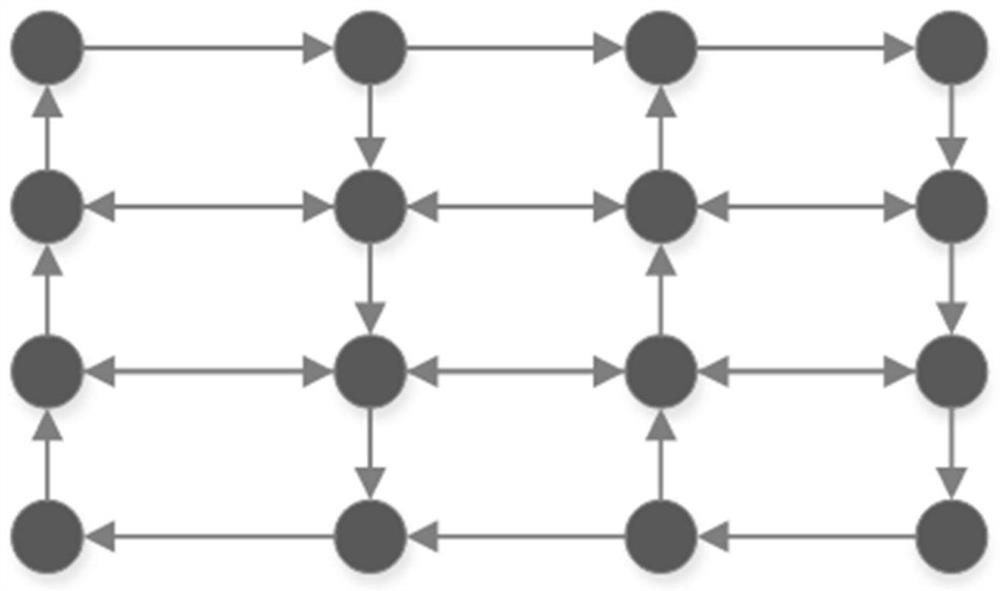
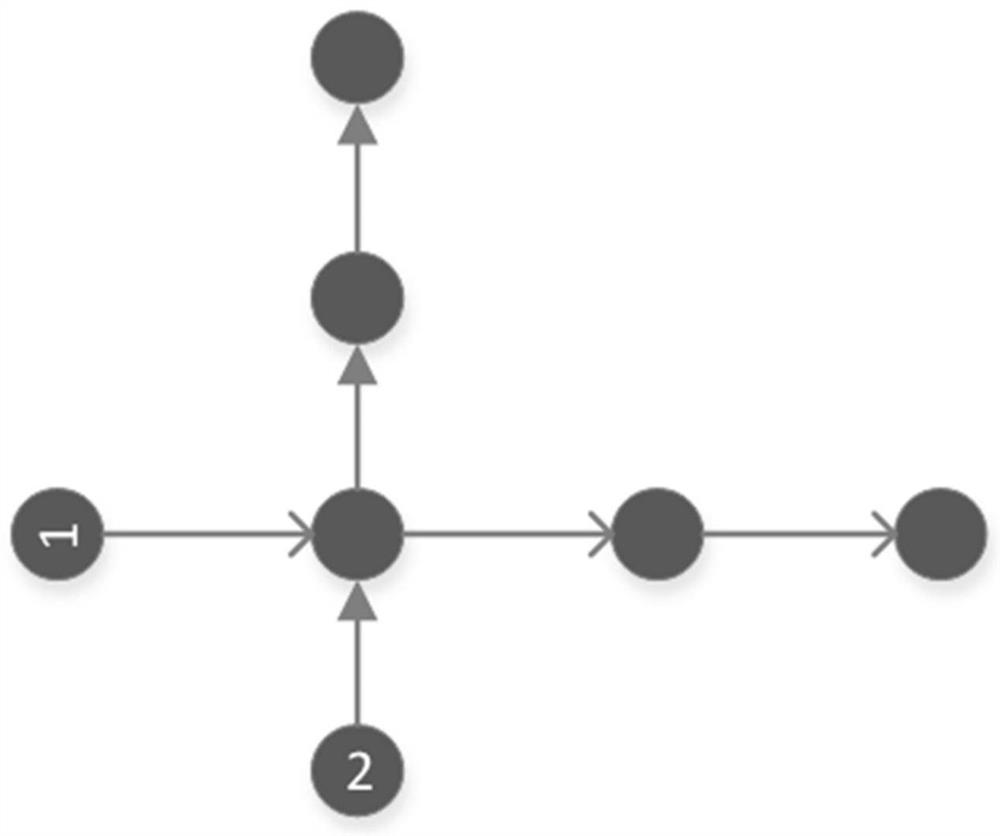
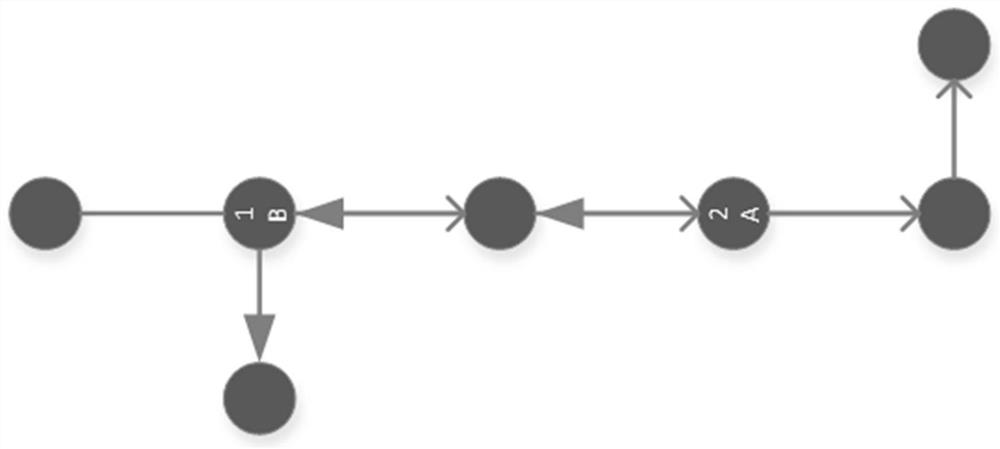
[0179] combine Figure 16 As shown, at the two-way intersection, A and B, C and D exchange positions respectively. At this time, the best paths are all going straight, but there is a mutual conflict between them. At this time, according to this method, after multiple rounds of iterations, the solutions of states (a) to (h) are sequentially generated, in which state (b) converts the opposite conflict of A and B into a cross conflict, and simultaneously increases A and C, A and For the cross conflict of D, state (c) resolves the conflict of B on the basis of state 2, and state (d) resolves the conflict of A; similarly (e) to (h) resolves the conflict between C and D. This is a case of changing the route through time, space, and multi-vehicle coordination to finally achieve the traffic goal, but this process has more steps. If the number of vehicles is also large, it will take more computing time in practical applications.
[0180] To sum up, the multi-vehicle route planning me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More