

Fixed-wing unmanned aerial vehicle cluster collaborative path planning method based on optimal pheromone grey wolf algorithm
A path planning, UAV technology, applied in vehicle position/route/height control, non-electric variable control, instruments, etc., to achieve the effect of enhancing convergence speed, speeding up solution efficiency, and improving optimization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
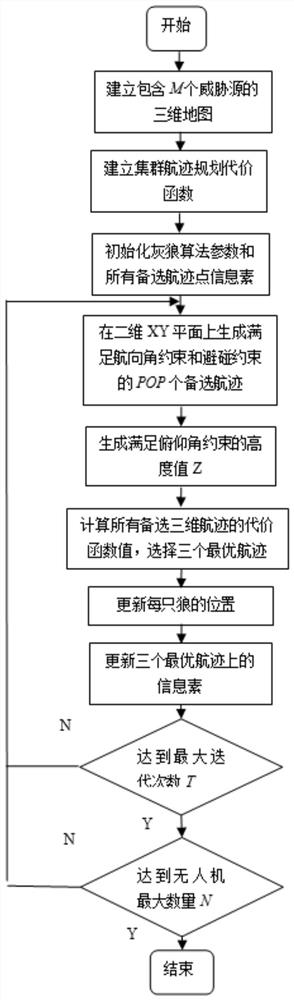
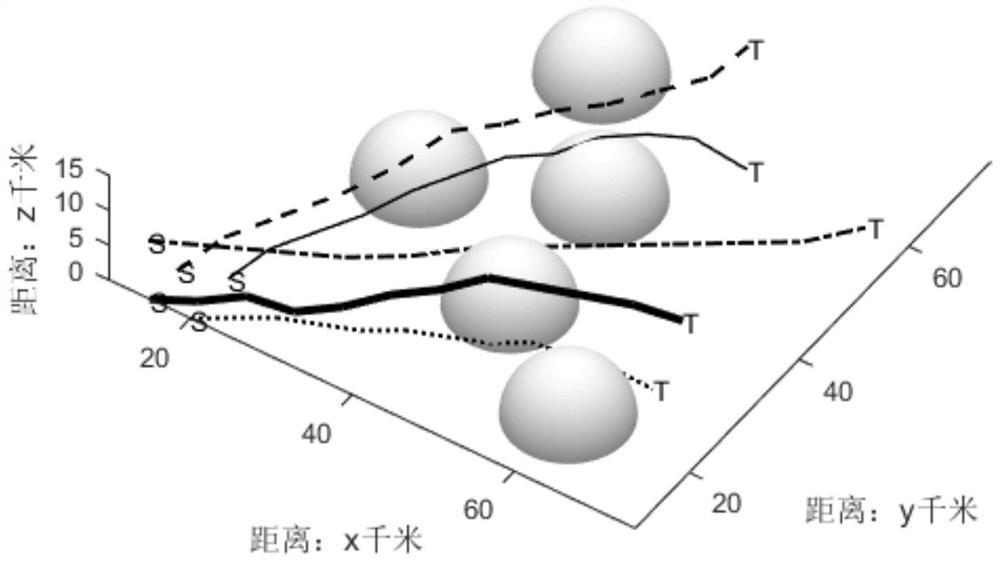
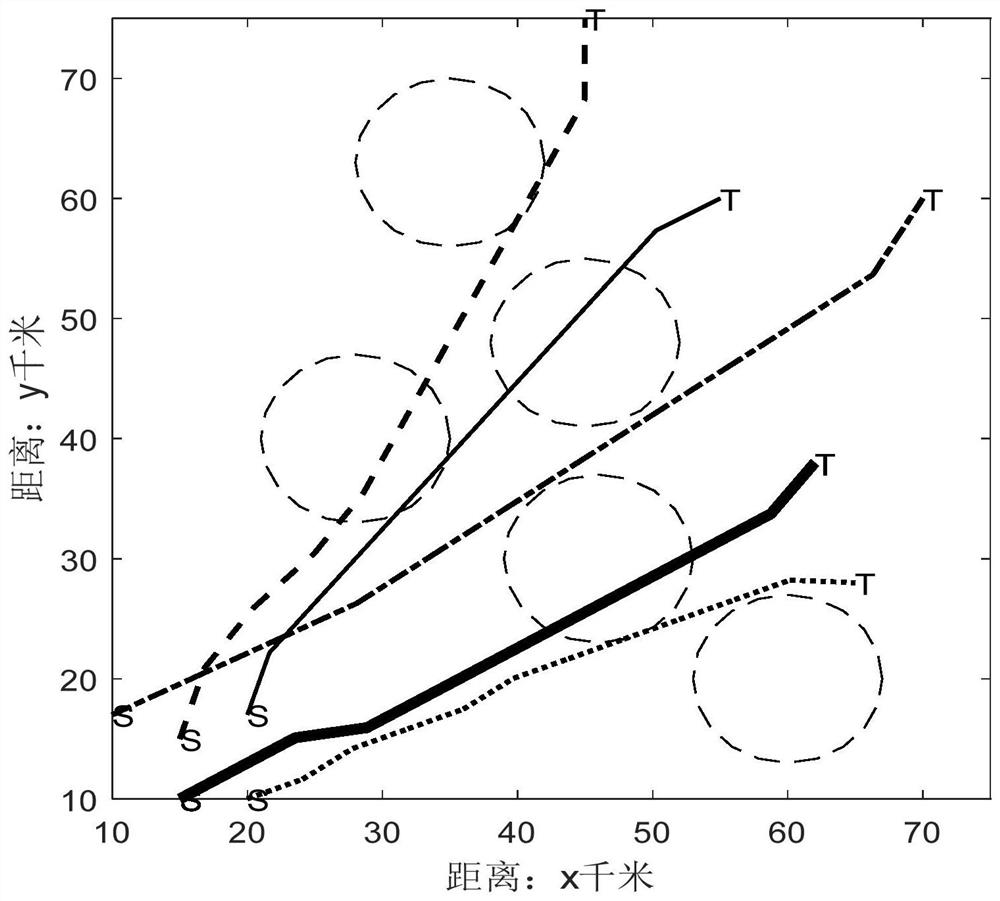
[0139] The simulation experiment is carried out on the Windows 10 operating system, the algorithm running platform is MATLAB2016B, and the planning space size is 75km×75km×15km. For N=5 fixed-wing UAV clusters, the above method is implemented in three scenarios of different complexity, and the implementation steps for each scenario are as follows:
[0140] Step 1: Establish a three-dimensional map containing M=5 threat sources, and determine the starting point and target point of each UAV. The information of the threat source is shown in Table 1, and the starting point and target point of the UAV are shown in Table 2. Divide the line ST between the starting point S and the target point T of each UAV into 11 parts, that is, the track of each UAV contains 10 track points.
[0141] Table 1 Threat source information
[0142]
[0143] Table 2 UAV starting point information
[0144]
[0145]
[0146] Step 2: Establish a cost function for cluster trajectory planning;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More