

Double-arm collaborative robot control method and system for assisting oral medical image
A medical imaging and control system technology, applied in the field of medical robots, can solve problems such as poor consistency of oral images and exposure stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0020] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
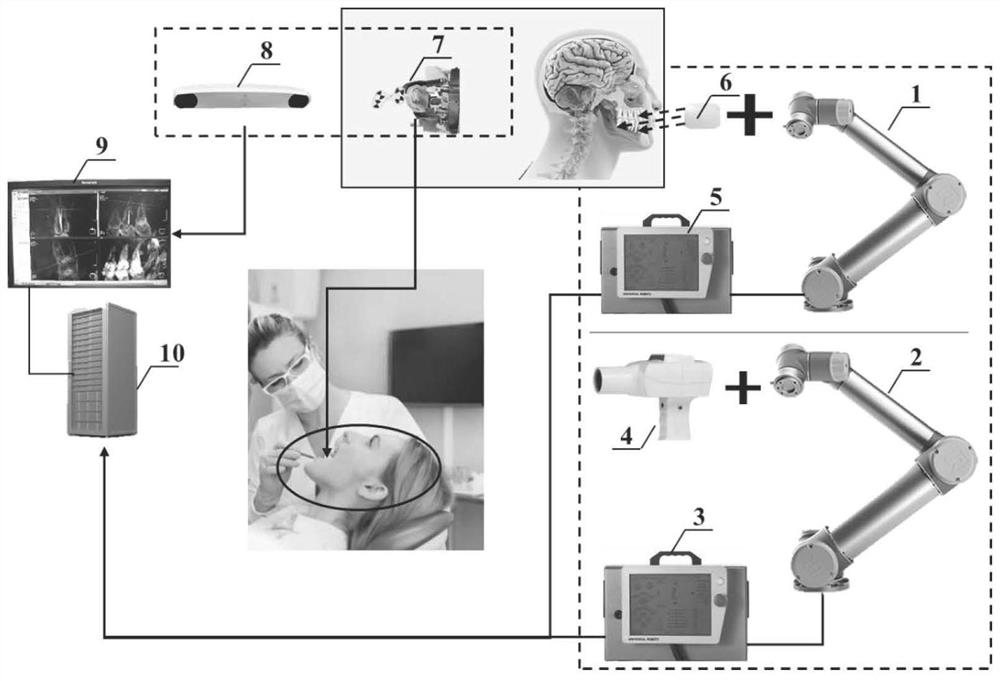
[0021] as attached figure 1 As shown, the trajectory tracking control process of the photosensitive plate clamping robot system of the present invention mainly includes: pretreating the inside of the patient's oral cavity before treatment, performing CT scanning on it to reconstruct the patient's 3D oral cavity model, and obtaining the patient's oral cavity lesion. Calibrate the end gripping of the robot, and convert the angle of the lesion from the oral coordinate system to the end gripping coordinate system to perform hand-eye calibration. The pose of the marker is estimated and converted from the camera coordinate system to the base coordinate system of the robot arm. When the pose detected by the camera of the marker changes, the end-clamped robotic arm will track the trajectory of the patient's teeth. After the manipulator moves to the designate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More