

Vision-based pose stabilization control method of moving trolley
A technology for moving the trolley and stabilizing control, which is applied in the field of intelligent robots, and can solve problems such as the dynamic model of the trolley and the servo speed without consideration, and achieve the effects of fast servo speed, improved speed and precision, and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to better understand the technical solution of the present invention, a four-wheel differential drive mobile trolley with a monocular camera is taken as the research object to further introduce the embodiment of the present invention.
[0028] 1.1. Construct vision-based mobile car kinematics model and dynamics model, camera model
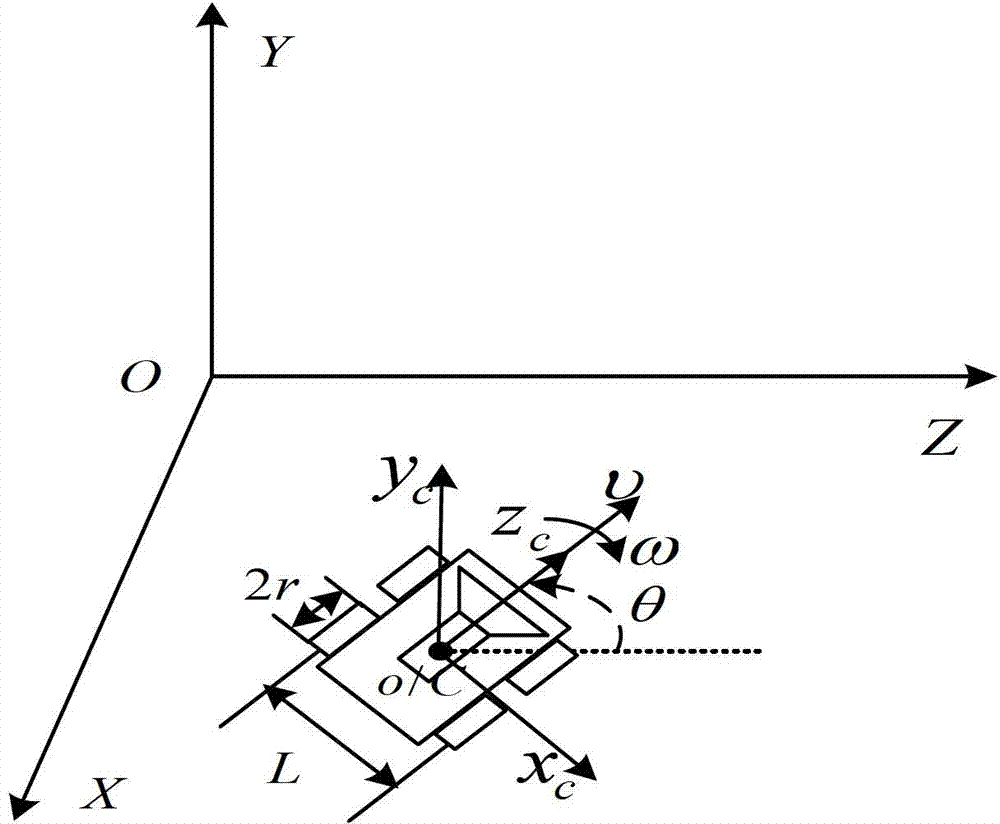
[0029] Such as figure 1 Shown is a four-wheel mobile car model, the front two wheels are driven, and the rear two wheels are differentially driven. The monocular camera is fixedly installed at the center of the car and its optical axis points to the direction of the car movement. O-XYZ is the world coordinate system, C-x c the y c z c is the camera coordinate system, the origin C coincides with the center of mass o of the car. The pose of the car is determined by the vector q=[x,z,θ] T In other words, (x, z) is the coordinate of the center of mass o of the car, θ is the angle between the body direction and the Z axis, L is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More