Parking track automatic determination method and device, medium and electronic equipment
A parking and trajectory technology is applied in the field of media and electronic equipment, devices, and automatic parking trajectory determination methods, which can solve the problems of narrow parking space, narrow parking environment, complex parking environment, etc. The effect of improving parking safety and shortening the parking distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
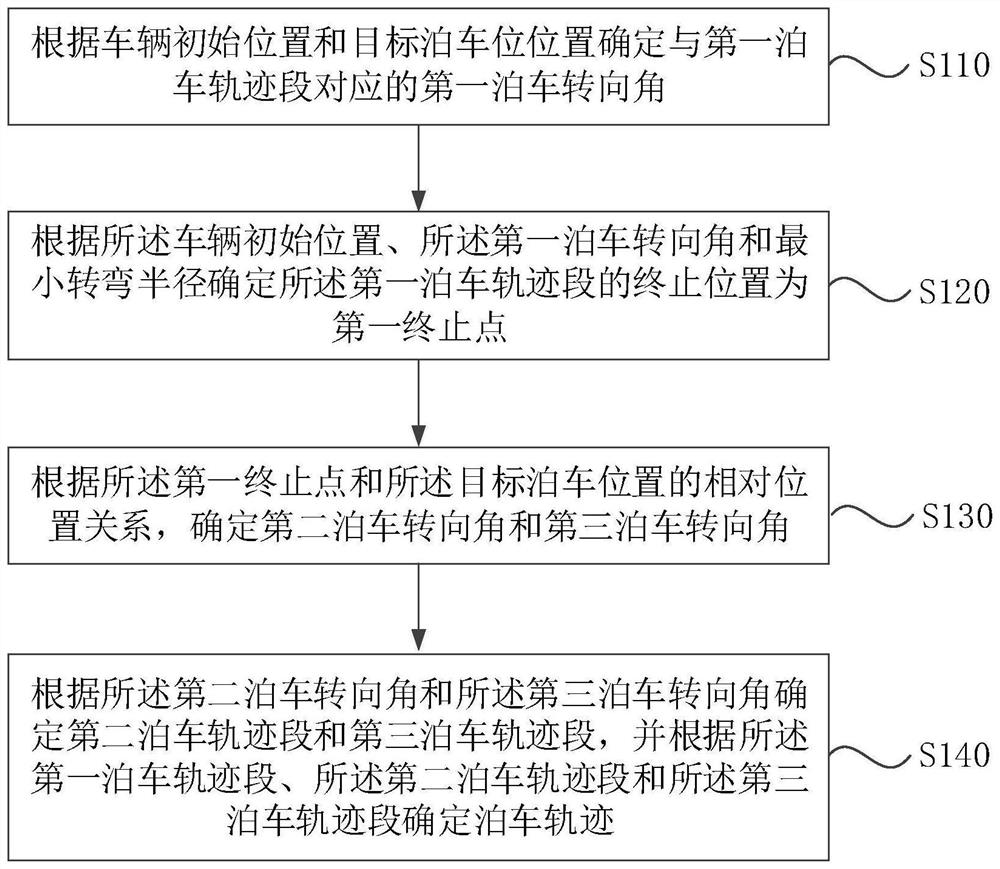
[0031] Figure 1A It is a flow chart of a method for automatically determining a parking trajectory provided by Embodiment 1 of the present application. This embodiment is applicable to automatically determining the parking trajectory during the process of parking in a narrow parking space perpendicular to the vehicle's initial pose. The method can be executed by the device for automatically determining the parking trajectory provided by the embodiment of the present application. The device can be realized by software and / or hardware, and can be integrated into the electronic equipment running the system.
[0032] Such as Figure 1A As shown, the method for automatically determining the parking trajectory includes:
[0033] S110. Determine a first parking steering angle corresponding to the first parking trajectory segment according to the initial vehicle position and the target parking space position.
[0034] When parking to a parking space in a complex and narrow parking en...
Embodiment 2
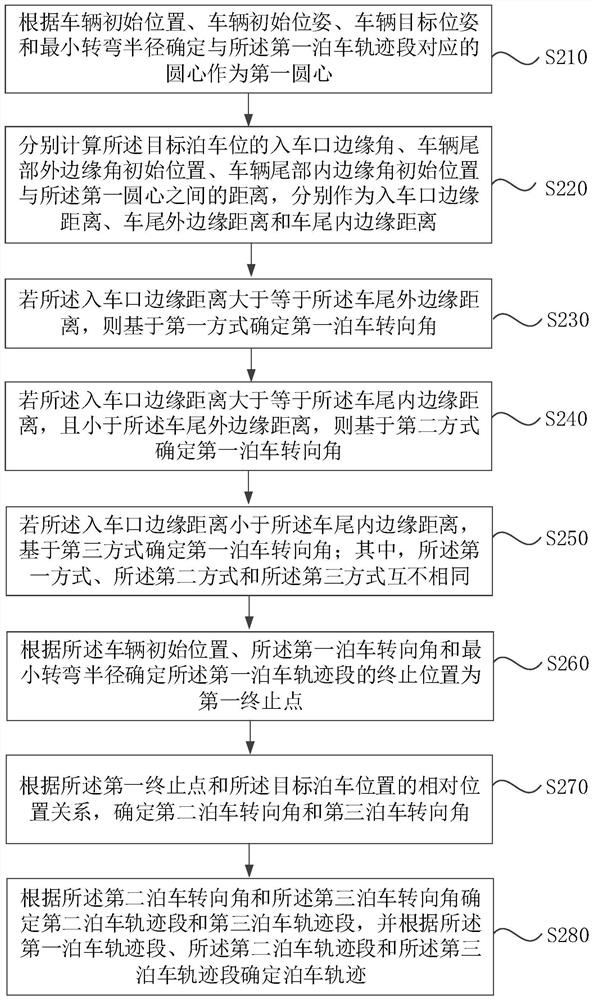
[0052] Figure 2A It is a flow chart of another method for automatically determining a parking trajectory provided in Embodiment 2 of the present application. This embodiment is further optimized on the basis of the foregoing embodiments. Specifically, for the operation "according to the relative positional relationship among the edge angle of the entrance of the target parking space, the initial position of the outer edge angle of the vehicle rear, and the initial position of the inner edge angle of the vehicle rear, determine the first parking trajectory corresponding to the first parking trajectory segment. - Parking Steering Angle" for further refinement.
[0053] Such as Figure 2A As shown, the method for automatically determining the parking trajectory includes:
[0054] S210. Determine a circle center corresponding to the first parking trajectory segment as a first circle center according to the initial position of the vehicle, the initial pose of the vehicle, the t...
Embodiment 3
[0085] Figure 3A It is a flow chart of yet another method for automatically determining a parking trajectory provided in Embodiment 3 of the present application. This embodiment is further optimized on the basis of the foregoing embodiments. The specific optimization is that, according to the relative positional relationship between the first termination point and the target parking position, determining the second parking steering angle and the third parking steering angle includes: determining The straight line of the first end point, on which the center of circle corresponding to the second parking trajectory segment is determined as the second center of circle, so that the distance from the first end point to the first center of circle and the second center of circle is The distance is equal to the minimum turning radius; if the horizontal distance between the second circle center and the midpoint of the target parking space is less than the minimum turning radius, then ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com