Dynamic de-compiling method, device and system based on virtual grouping
A technology of decompilation and status, applied in the field of rail transit, can solve the problems of low train operation efficiency and achieve the effect of improving train operation efficiency and reducing occupancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
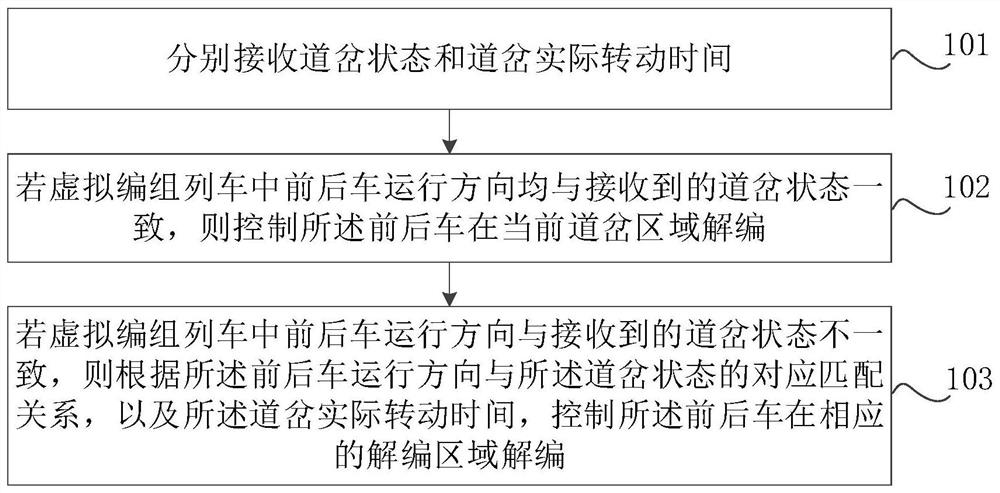
[0032] figure 1 It is a schematic flow chart of a dynamic compilation method based on virtual grouping according to an embodiment of the present application. Such as figure 1 As shown, the dynamic programming method based on virtual marshalling in the embodiment of the present application includes:
[0033] Step S101, respectively receiving the state of the turnout and the actual turning time of the turnout, the actual turning time of the turnout is determined by the health monitoring server of the turnout according to the health state of the turnout.
[0034] In implementation, the health state of the turnout includes: a healthy state, a sub-healthy state, and an unhealthy state. The actual turning time of the turnout is a step determined by the health monitoring server of the turnout according to the health state of the turnout, including the following steps:
[0035] Utilize the health state model of the turnout in the health monitoring server of the turnout to determine ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More