

Intelligent obstacle avoidance control system for mechanical arm of spray boom type pesticide sprayer
A technology of intelligent obstacle avoidance and control system, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as trouble
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
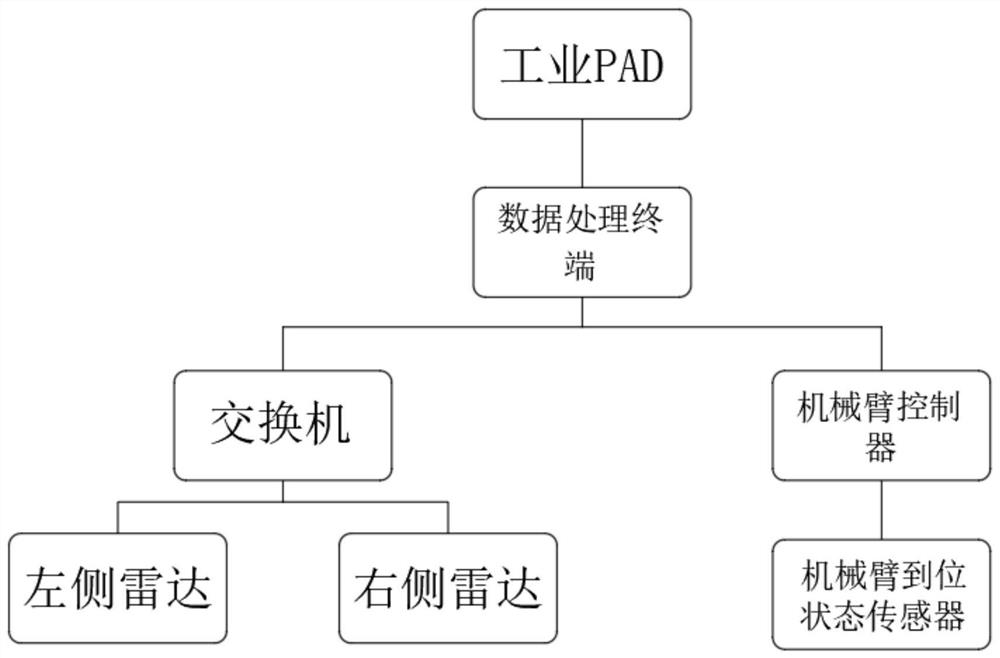
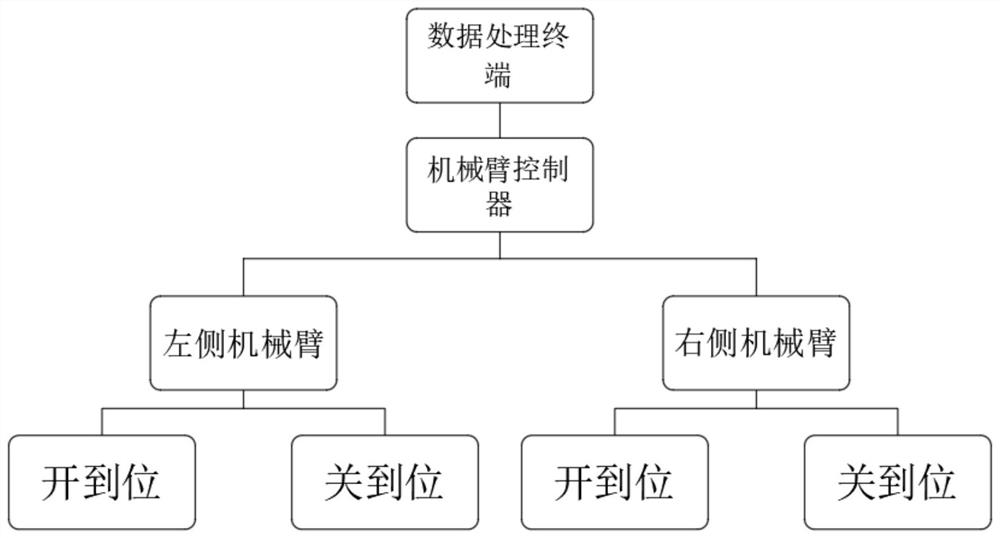
[0024] An intelligent obstacle avoidance control system for the robotic arm of a sprayer sprayer, including an industrial PAD, a data processing terminal, a switch, a radar, and a robotic arm controller. The industrial PAD is connected to the data processing terminal, and the data processing terminal is connected to the switch and the mechanical arm respectively. The controller is connected, the switch is connected to the radar, the controller of the robotic arm is connected to the in-position status sensor of the robotic arm, and the in-position status sensor of the robotic arm is connected to the left robotic arm and the right robotic arm respectively.
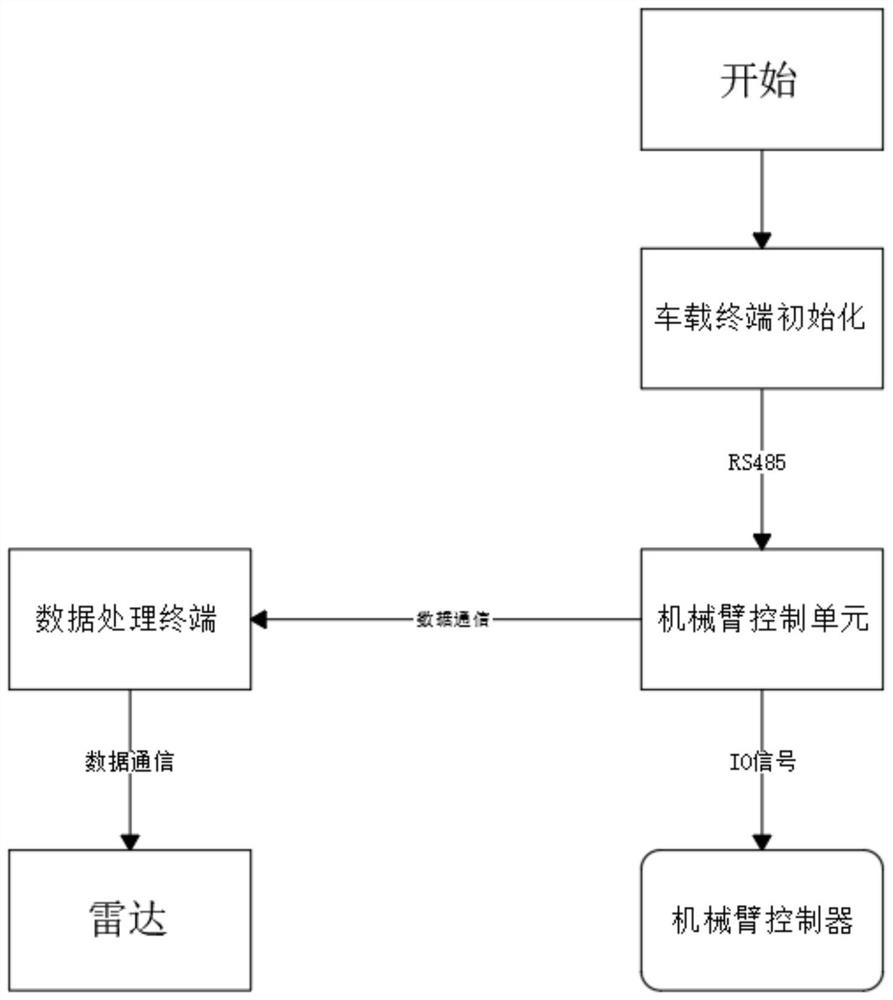
[0025] In this embodiment, the industrial PAD performs parameter initialization on the data processing terminal.
[0026] In this embodiment, specific parameters for parameter initialization are real-time data transmission and initialization data transmission.
[0027] In this embodiment, the real-time data transmission incl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More