Magnetic response bionic crawling soft robot and preparation method thereof
A magnetic response and robotics technology, applied in the field of bionic robots, can solve problems such as difficulty in the preparation of soft robots, and achieve the effects of reducing production cost and preparation difficulty, reducing realization difficulty and optimizing preparation process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
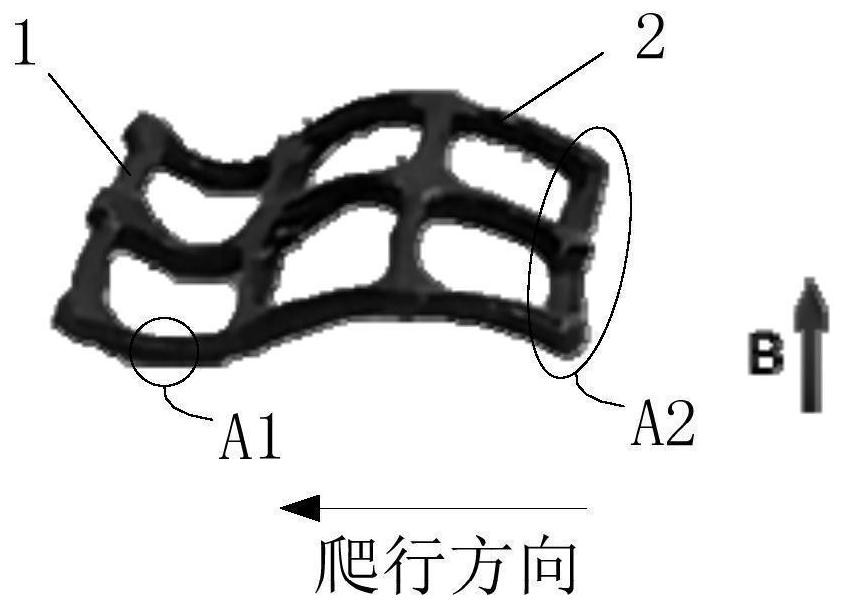
[0030] Such as figure 1 As shown, this embodiment provides a magnetic response bionic crawling soft robot, which includes: a magnetoelastic body and a magnetic response driver; wherein, the magnetoelastic body serves as an integrated flexible actuator that can continuously crawl forward, The magnetic response driver is used to apply an external remote-driven magnetic field to the magnetoelastic body, so that the magnetoelastic body performs bionic crawling under the synergistic effect of magnetic force and friction force.
[0031] In this embodiment, the magnetoelastic body is grid-shaped, and the grid includes a transverse elastic body 1 and a longitudinal elastic body 2, wherein the longitudinal elastic body 2 is provided with magnetic particles, and the magnetic particles are magnetized in the first magnetic field to make the magnetic The elastic body is shaped into a curved state; wherein, the curved state is a sinusoidal curve.
[0032] Specifically, the magnetoelastic b...
Embodiment 2
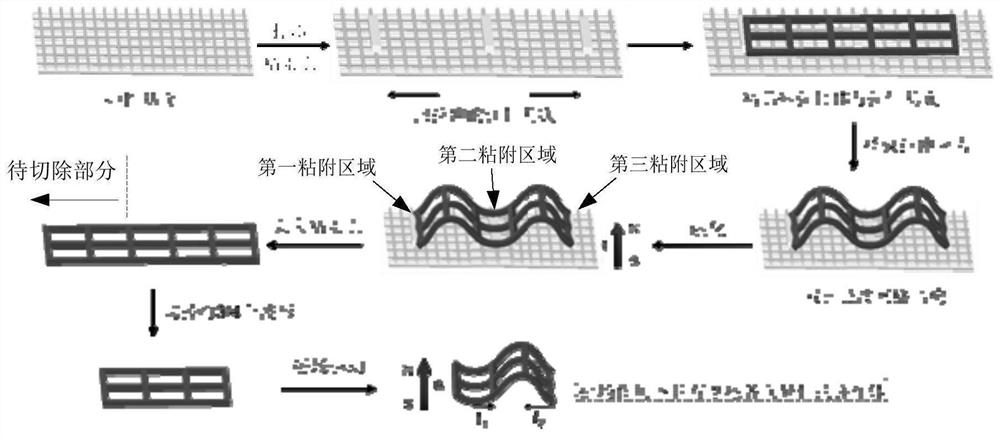
[0081] Such as image 3 As shown, this embodiment provides a method for preparing a magnetically responsive bionic crawling soft robot. The method includes: Step 1, using the first flexible material and 3D printing technology to make a flexible substrate, and horizontally pulling the cured flexible substrate Stretching; wherein, the stretching strain is 10%-300%.
[0082] It should be noted that, in this embodiment, the specific form of the 3D printing technology is not limited, and may be direct ink writing (DIW), stereolithography (SLA), micro stereolithography (PuSL), fused deposition Any of conventional techniques such as two-photon polymerization lithography (TPL) and rapid liquid printing (RLP) techniques.
[0083] Specifically, silica gel-based elastic materials can be selected as the base material of the flexible base (the first flexible material), and materials such as hydrogel, liquid crystal elastomer, dielectric elastomer, and shape memory polymer can also be sele...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Width | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap