

Construction robot for disassembling and replacing power transmission line and advancing speed control device and method thereof
A technology of traveling speed and control device, applied in vehicle position/route/height control, control/regulation system, non-electric variable control, etc. The effect of ensuring work efficiency, improving stability and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
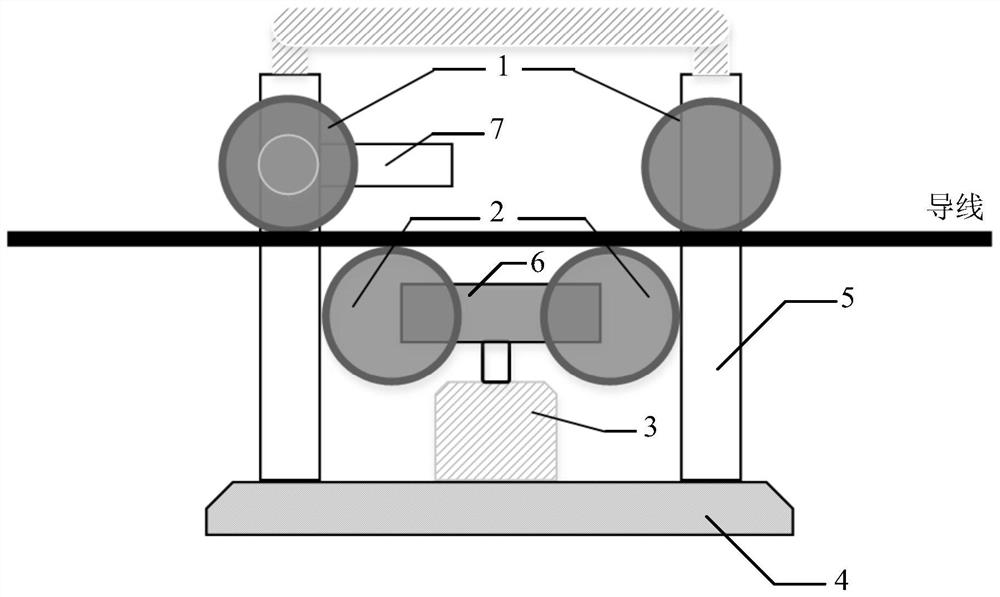
[0028] Such as figure 1 As shown, the replacement line construction robot of the embodiment of the present invention includes a driving wheel set 1 for setting on the wire, a tensioning wheel set 2 for setting under the wire, and a tensioning wheel set 2 for jacking up. The jacking device 3 for providing tension, the base 4, the driving wheel frame 5 arranged between the driving wheel set 1 and the base 4, the tensioning wheel frame 6 set corresponding to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More