

Amphibious inspection robot
An inspection robot, amphibious technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of single inspection function and high operating environment requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
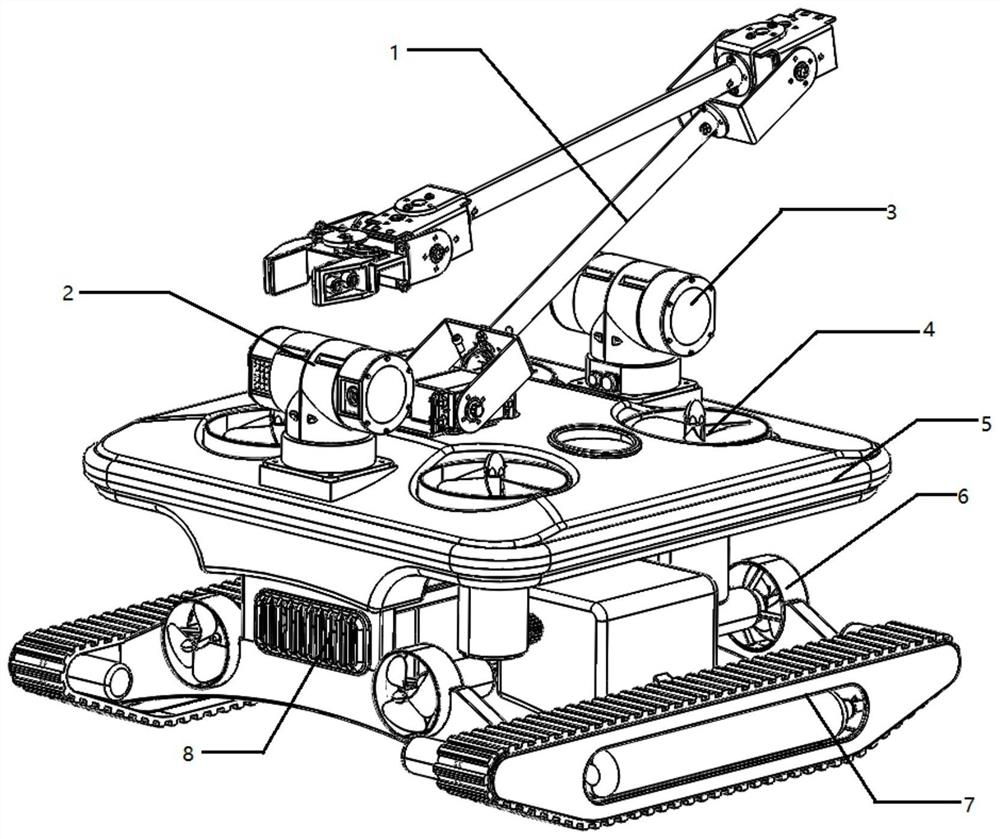
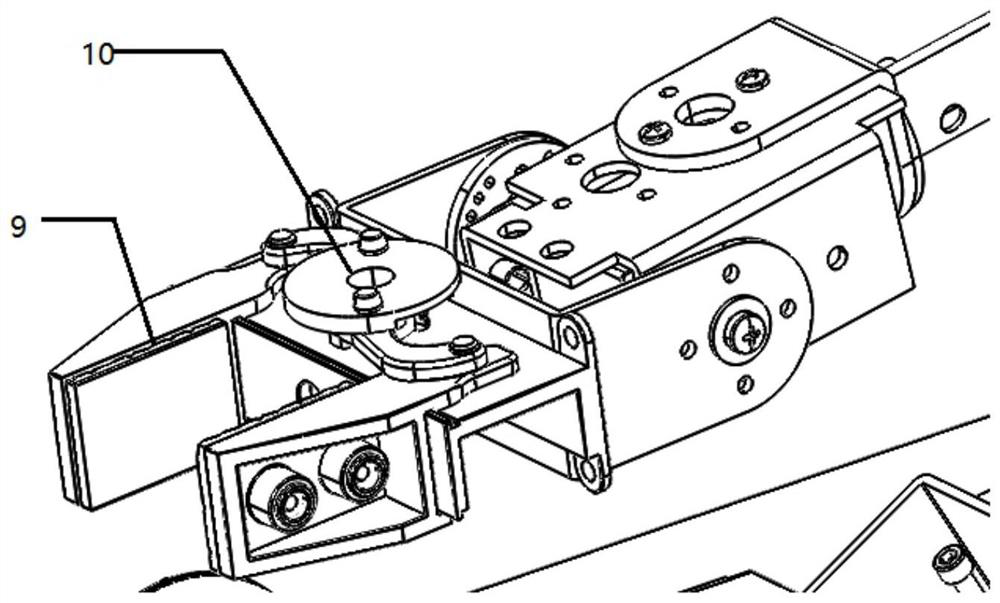
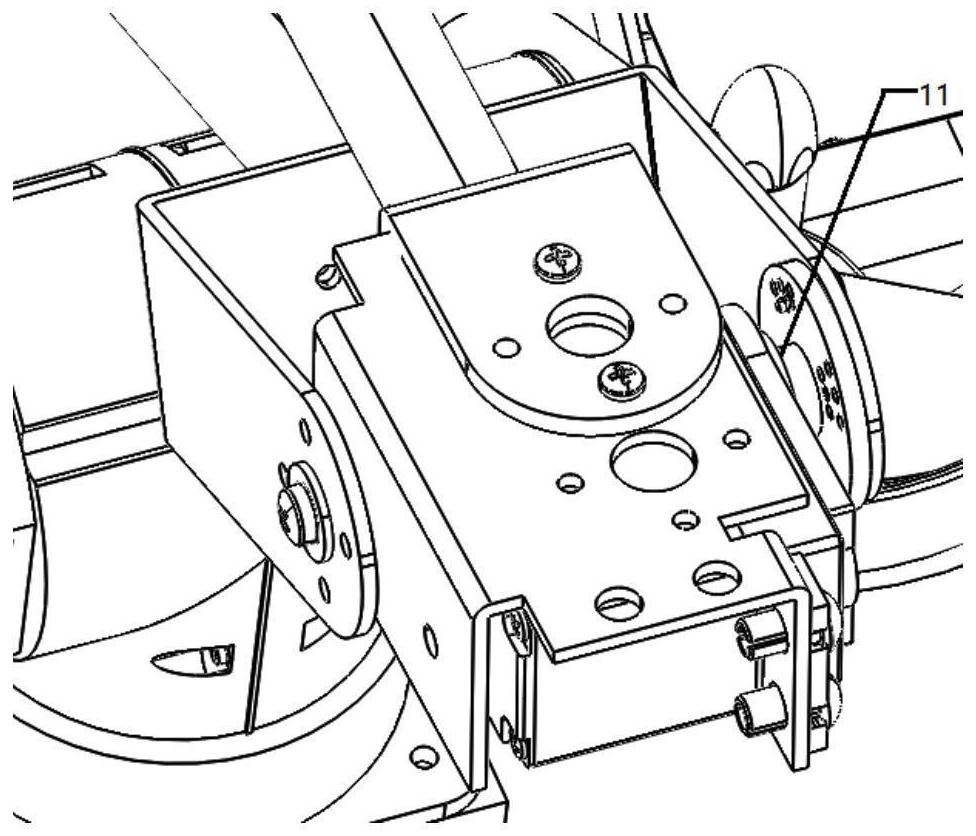
[0024] Such as Figure 1-6 As shown, an amphibious inspection robot provided by the present invention includes a mechanical arm 1, a front inspection device 2, a rear inspection device 3, a vertical propeller 4, a protective shell 5, a horizontal propeller 6, and a track wheel 7. Underframe 8, mechanical claw 9, rotating device 10, rotating device control motor 11, searchlight 12, base 13, rotating device 14, camera 15, crawler belt 16, crawler motor 17, protective box 18, crawler protection plate 19, beam 20. Motor one 21 and motor two 22, characterized in that: figure 1 The bottom of the shown amphibious inspection robot is provided with an underframe 8, the underframe 8 is a frame structure, and the underframe 8 is used as an equipment mounting frame for the robot. The structural spaces are designed according to the installation requirements...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More