

Control method and system for randomly filling unmanned aerial vehicle device based on ecological geographic algorithm
A technology of random filling and control methods, applied in radio transmission systems, transmission systems, computing, etc., can solve the problems of easy frequency interference and poor communication quality, and achieve the effects of ideal radiation pattern, increased bandwidth, and high radiation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] It is easy to understand that, according to the technical solution of the present invention, those skilled in the art can propose multiple structural modes and implementation modes that can be replaced without changing the essence and spirit of the present invention. Therefore, the following specific embodiments and drawings are only exemplary descriptions of the technical solution of the present invention, and should not be regarded as the entirety of the present invention or as a limitation or restriction on the technical solution of the present invention.
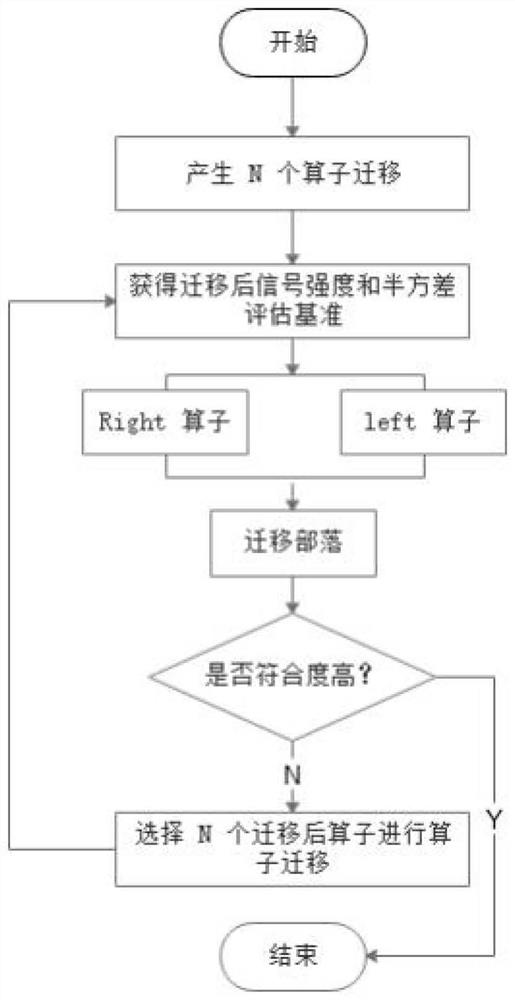
[0052] As an understanding of the ecological geography algorithm based on the present invention, the complex ecological geography (geomorphology) algorithm is a population-based optimization algorithm, and its core idea is to learn from the seed and spore propagation methods in nature, two kinds in total: 1, such as dandelion , Agaricus use the wind to disperse seeds and spores; 2, such as general tree fruits borro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More