

Vision-based pedestrian taxi calling behavior identification method
A pedestrian and behavior technology, which is applied in the field of automatic driving taxis to identify pedestrian behavior intentions, can solve the problem that behavior recognition algorithms cannot be applied to reasoning of car-hailing intentions with instantaneous characteristics, and achieves the process of improving environmental adaptability, simplifying networks, and reducing Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
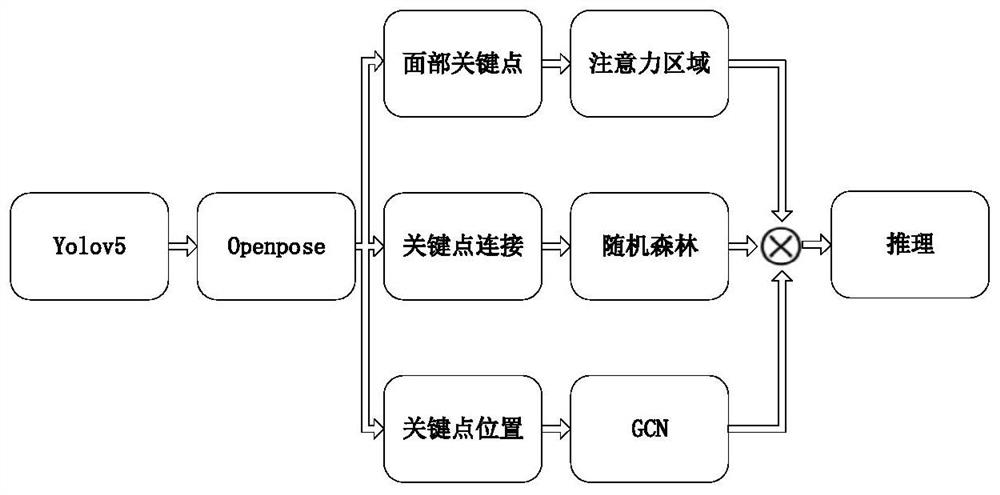
[0031] Below in conjunction with accompanying drawing, the present invention is further described, as figure 1 As shown, a vision-based pedestrian calling behavior recognition method includes the following steps:
[0032] A. Image preprocessing
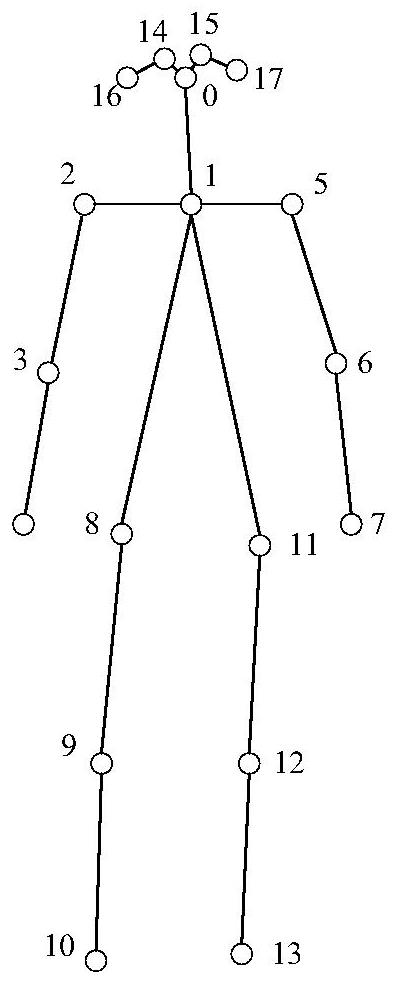
[0033]Using Yolov5 as the target detection method and the human body key point extraction algorithm OpenPose to realize the preprocessing of the image, and obtain the pedestrian detection frame D and the key point parameters K of the corresponding pedestrians in each detection frame, where the key point parameters are as follows: figure 2 As shown, the corresponding relationship between the sequence of key points and the parts of the human body is:
[0034]
[0035] The detection frame provided by object detection can improve the accuracy of human key point extraction. In the process of car-calling intention reasoning, the facial attention of the human body is the key clue to judge whether it has the car-calling intention. In th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More