

Target positioning method fusing laser radar and camera and related device
A laser radar and target positioning technology, which is applied in the direction of measuring devices, computer components, electromagnetic wave re-radiation, etc., can solve the problem of low accuracy of positioning results, achieve the effect of reliable optimal transformation matrix and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to enable those skilled in the art to better understand the solution of the present application, the technical solution in the embodiment of the application will be clearly and completely described below in conjunction with the accompanying drawings in the embodiment of the application. Obviously, the described embodiment is only It is a part of the embodiments of this application, not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
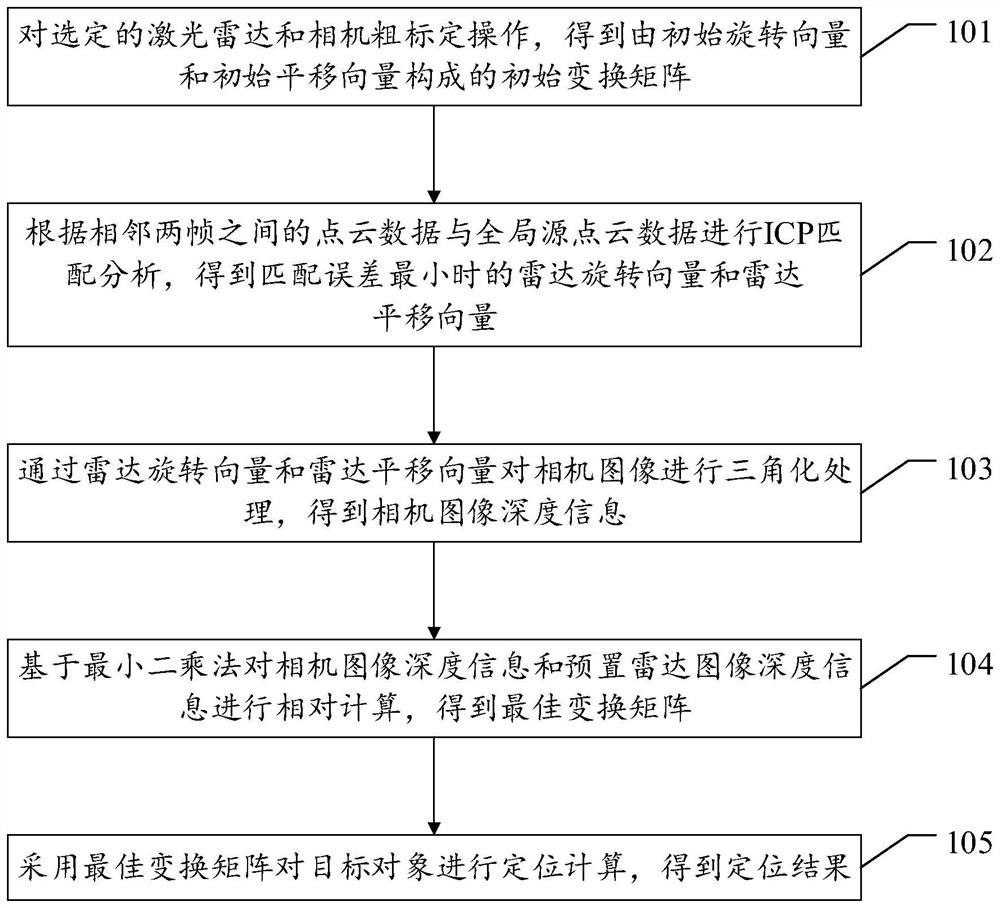
[0040] For ease of understanding, see figure 1 , an embodiment of a target location method that integrates lidar and camera provided by the present application, including:
[0041] Step 101, perform a rough calibration operation on the selected lidar and camera to obtain an initial transformation matrix composed of an initial rotation vector and an initial transla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More