Workshop AGV path planning method based on improved ant colony algorithm and dynamic window
A dynamic window and ant colony algorithm technology, which is applied in the direction of motor vehicles, vehicle position/route/height control, transportation and packaging, can solve the problem of AGV car stop delivery, etc., to improve path smoothness, strong robustness, Effect of reducing path planning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
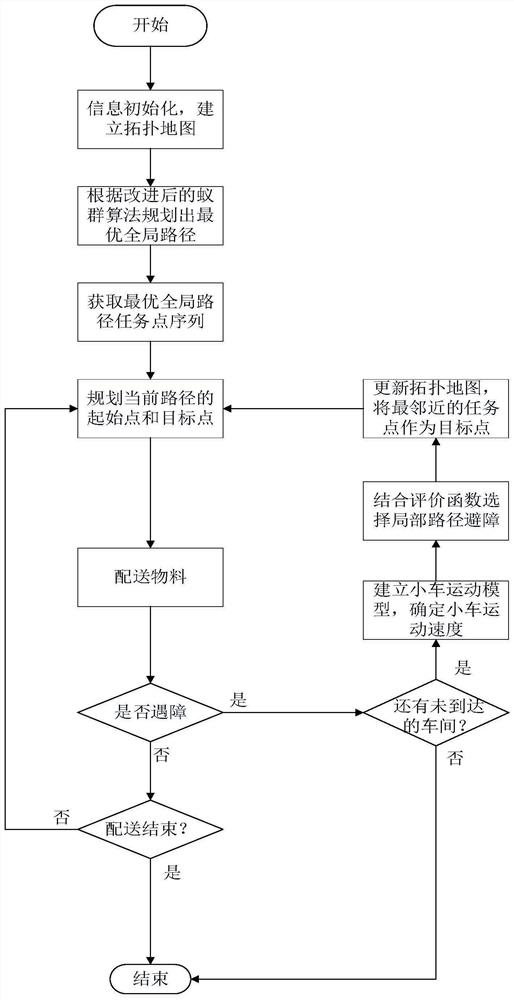
[0024] refer to figure 1 , the workshop AGV trolley path planning method of improved ant colony algorithm and dynamic window described in the present invention comprises the following steps:
[0025] Step 1: Combining the characteristics of road information, workshop information, and laser navigation in the data center, the topology structure is used to model the workshop map environment to form a workshop topology map. The distance between two adjacent points in the topology map is the on-site The actual distance is obtained from the start workshop, the destination workshop and the number n of mission points that the AGV car needs to reach the workshop. The number of mission points n is the number of workshops that the AGV car needs to reach, including the start workshop and the destination workshop.
[0026] Step 2: Plan the optimal global path L of the AGV car through the improved ant colony algorithm. The improved ant colony algorithm has higher optimization accuracy and s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More