Underwater robot path planning method for three-dimensional environment
An underwater robot, path planning technology, applied in the direction of instruments, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as suboptimal, not considering the optimization of the local LazyTheta* algorithm, and the path cannot be locally optimized. , to achieve the effect of improving smoothness, improving path smoothness and algorithm operation efficiency, and reducing waypoints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
[0042] A method for path planning of an underwater robot in a three-dimensional environment, comprising the following steps:
[0043] S1: Establish a three-dimensional model of the near-bottom environment;
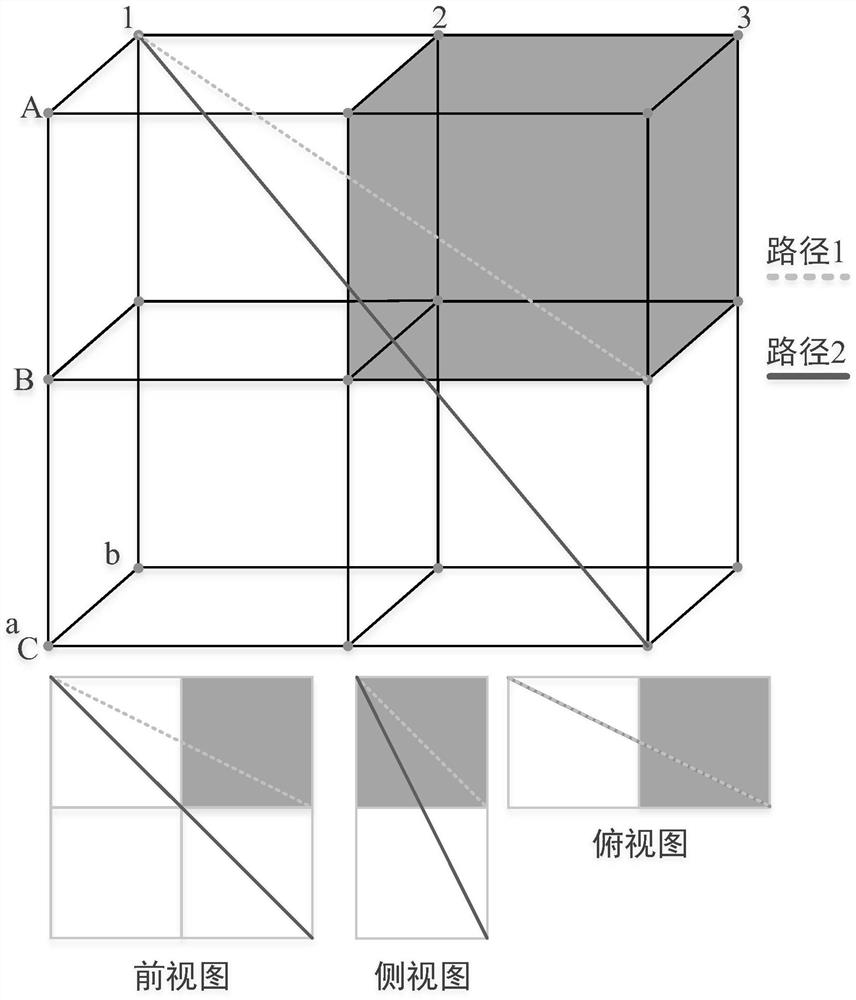
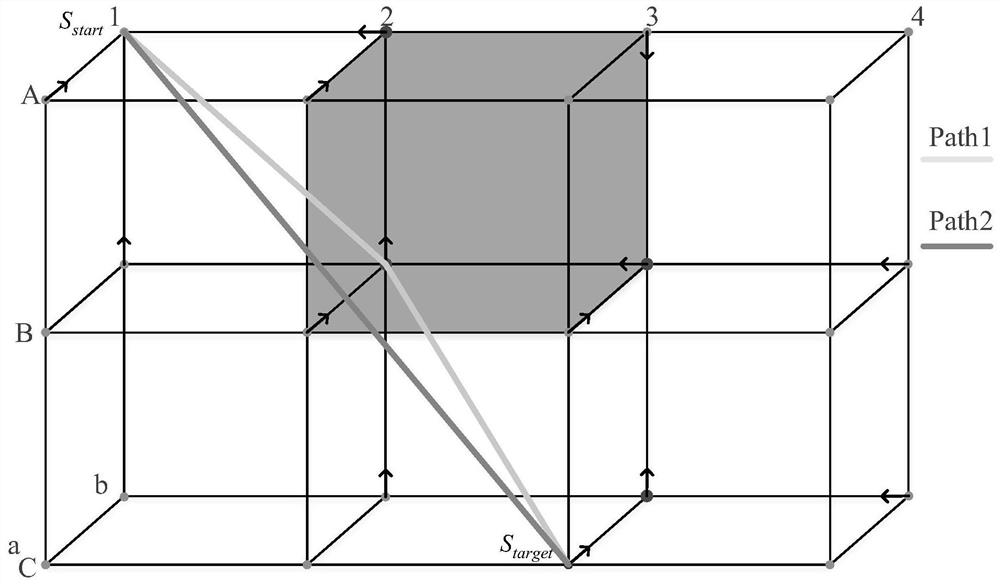
[0044] S2: Define the starting point and end point of the AUV (autonomous underwater vehicle) to run the route, define the search direction of the PSLT algorithm, based on the 3D model of the near-bottom environment, start from the starting point, run the PSLT algorithm to search for the optimal waypoint of the path , to obtain the optimal waypoint set of the path, and form the optimal path through the optimal point of the optimal point set of the path waypoint.
[0045] Steps S1 and S2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More