Path planning method for inspection robot in data center based on improved ant colony algorithm
An inspection robot and ant colony algorithm technology, applied in the field of inspection robots, can solve problems such as time-consuming, unsuitable for large-scale inspection tasks, and long total inspection path.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
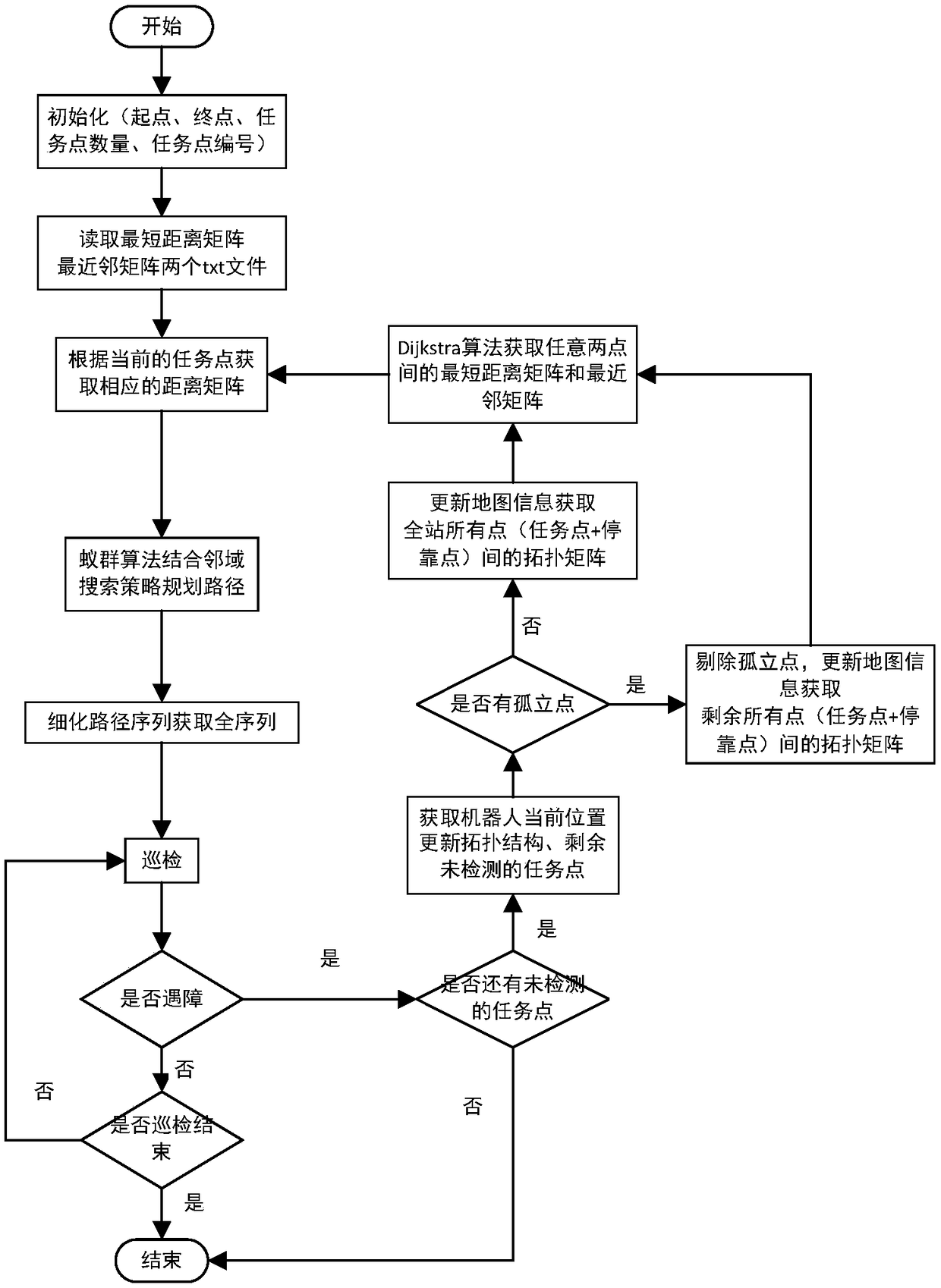
[0029] refer to figure 1 , a data center inspection robot path planning method based on the improved ant colony algorithm, including the following steps:
[0030] S1. Initialization information, namely the start point, end point, number of task points, number of task points, and at the same time read the shortest distance matrix and nearest neighbor matrix between all points in the whole station stored in advance. All points in the whole station are dependent points and task points , the shortest path matrix and topology matrix between all points in the whole station are the main symmetrical matrix, and the number of task points is 800-1500. The premise of this step ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More