

Six-dimensional force measuring platform and decoupling method thereof
A measurement platform and six-dimensional force technology, applied in the field of six-dimensional force measurement platform and its decoupling, can solve the problem of low measurement accuracy, achieve high measurement accuracy, good followability and consistency, no assembly stress and connection gap Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
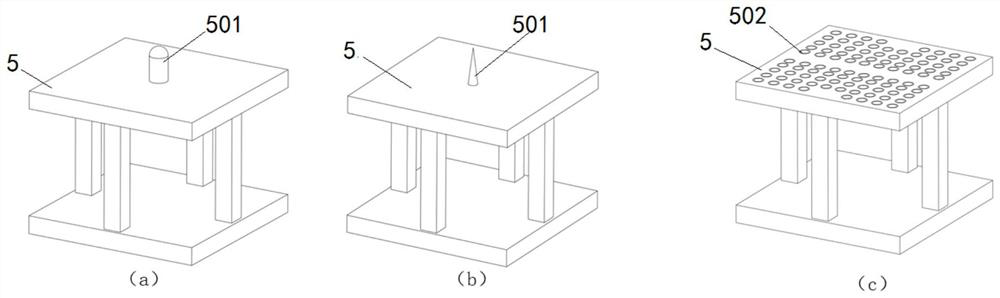
[0084] As one of the preferred solutions, one of the three-dimensional force sensors is a polygonal structure, because the polygonal structure has the characteristics of good stability and symmetrical force, which is beneficial to realize the physical decoupling of the multi-dimensional force sensor. In this embodiment, two regular octagonal ring structures 1221 perpendicular to each other are used as the elastic structure of the three-dimensional force sensor, which is defined as a double octagonal elastic structure 122, and are arranged symmetrically at multiple positions of the double octagonal elastic structure 122. A semiconductor resistance strain gauge 13 is combined into three Wheatstone full-bridge circuits to realize the decoupling measurement of three-dimensional force, and the specific introduction is as follows. see Figure 5 (a) and Figure 6 (a), the XY plane and the XZ plane are two central planes of the double octagon elastic structure 122 respectively.
[0...
Embodiment 2
[0098] As one of the preferred solutions, one of the three-dimensional force sensors is a beam structure, which can be a straight beam structure or a variable cross-section beam 121, but its core is to arrange semiconductor resistance strain gauges 13 on the beam structure and combine them into a Decoupling 3 Wheatstone bridges measuring three-dimensional force components.
[0099] Specifically, such as Figure 9 As shown in (a), the middle part of the six-dimensional force measurement platform based on the variable cross-section beam 121 is four variable cross-section, straight beam-type three-dimensional force sensors, and the structure of each three-dimensional force sensor is as follows Figure 9 (b) shown. The variable cross-section beam 121 is divided into upper and lower two short and thick outer quadrangular prisms 1211 and a middle long and thin middle quadrangular prism 1212, the middle quadrangular prism 1212 is arranged between the two outer end quadrangular prism...
PUM
| Property | Measurement | Unit |
|---|---|---|
| gauge factor | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More