

Optimization method for improving splicing precision of double-spherical camera and electronic equipment
An optimization method and double spherical technology, applied in the field of image processing, can solve the problems of uneven distribution of pixels, distortion of camera images, and insufficient use of fisheye original pixels in the expanded image, etc., to achieve clear images and eliminate image deviations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0057] This embodiment provides an optimization method for improving the splicing accuracy of a double-spherical camera, including the following steps:
[0058] S1 acquires the original image and extracts the center and radius of the fisheye, performs fisheye distortion correction to obtain a square image with the same length and width;
[0059] S2 maps the left camera image to the right camera, and extracts the feature points of the ROI ring area near the 180-degree overlapping area of the two images;
[0060] S3 numbers the feature points and then pairs them, and performs an alignment operation through perspective transformation, so that the feature points are aligned as a whole;
[0061]S4 performs ring fusion on the processed images, and then performs fusion transition on the left and right images respectively, then expands them, and finally stitches and outputs the result.
[0062] In this embodiment, the images are flipped and aligned before the double fisheye images ...
Embodiment 2
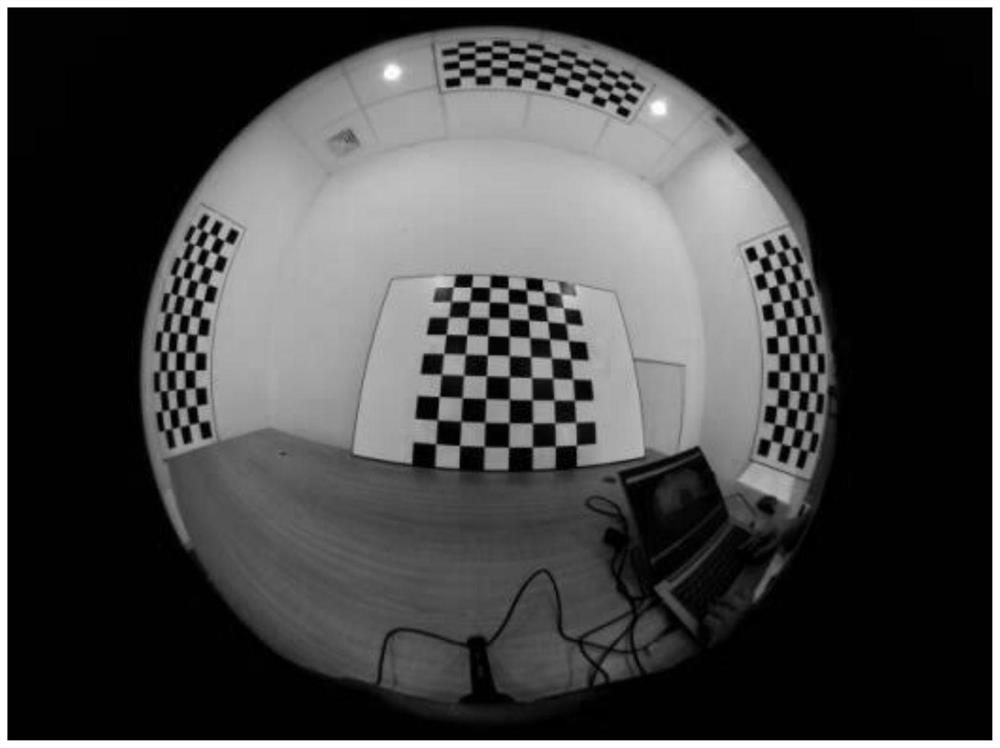
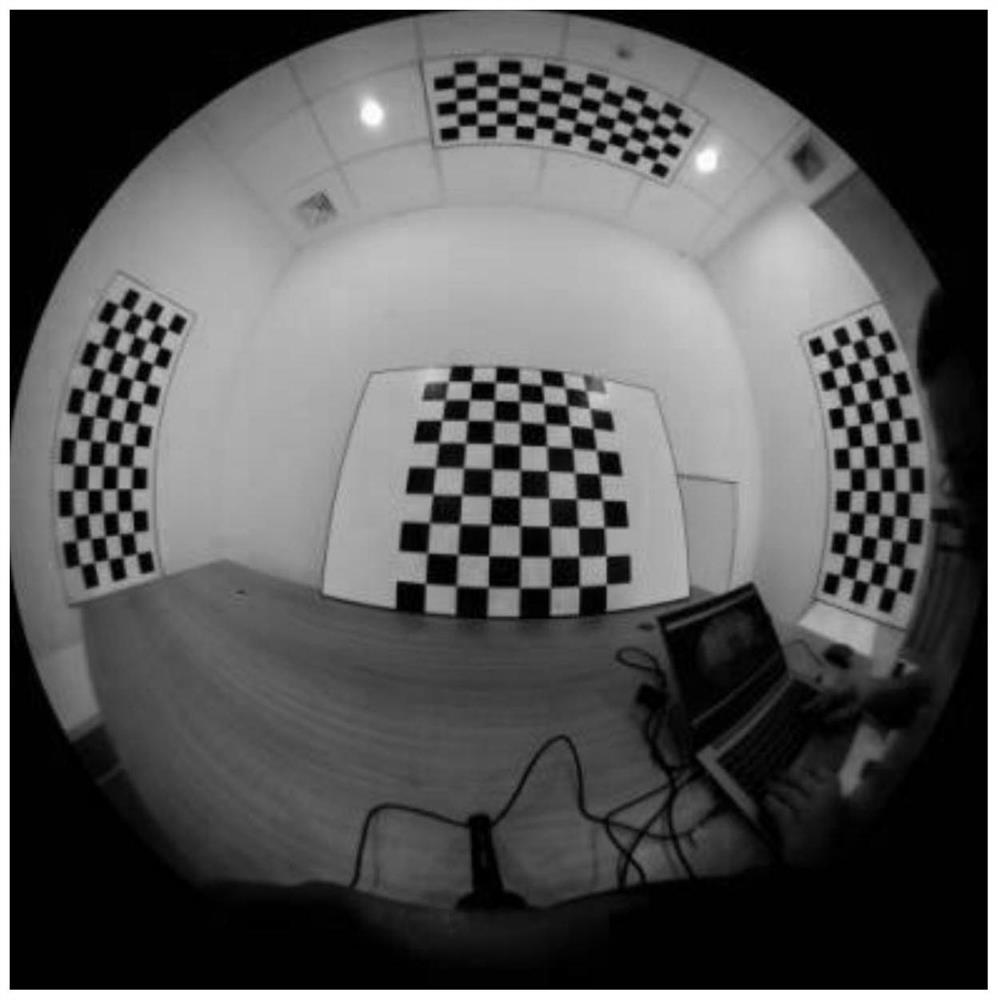
[0066] In terms of specific implementation, this embodiment is an optimization method for improving the splicing accuracy of a double-spherical camera. In this embodiment, the center and radius of the fisheye are extracted from the original image, and then the fisheye distortion is corrected to obtain a square image with the same length and width. Among them, the original right camera image as figure 1 As shown, the center is normalized and the distortion correction is performed as figure 2 shown.
[0067] In this embodiment, the image of the left camera is mapped to the right camera, where the coordinate points of the left image are:
[0068] LX=W / 2+left_R*cos(θL)
[0069] LY=H / 2+left_R*sin(θL)
[0070] In this embodiment, LX, LY are the pixel sub-pixel coordinates of the left image; W, H are the width and height of the left image; left_R is the distance from the left camera pixel to the image center; θL is the distance between the left pixel and the center horn.
[007...
Embodiment 3
[0096] This embodiment provides an electronic device, including a processor and a memory storing execution instructions. When the processor executes the execution instructions stored in the memory, the processor executes an optimization to improve the splicing accuracy of a double spherical camera. method.
[0097] To sum up, before the deployment of the present invention, the alignment is carried out. Firstly, the image of one lens is mapped to the field of view of another camera, and then the ROI of the overlapping part is extracted, and the feature points of the overlapping part of the two fisheye pictures are matched and aligned to avoid After the fisheye is unfolded, the affine transformation alignment is performed, and the alignment of the image after the expansion is easy to cause image distortion. Alignment before deployment can fully eliminate the image deviation caused by the back-to-back installation error of two cameras.
[0098] The present invention performs cir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More