

Wall-climbing robot with tunnel wall adsorption function and inspection method for water diversion and power generation tunnel of hydropower station
A wall-climbing robot and robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of not being able to stick to the wall for inspection, and achieve the effects of high inspection efficiency, true and comprehensive information, and a large inspection range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
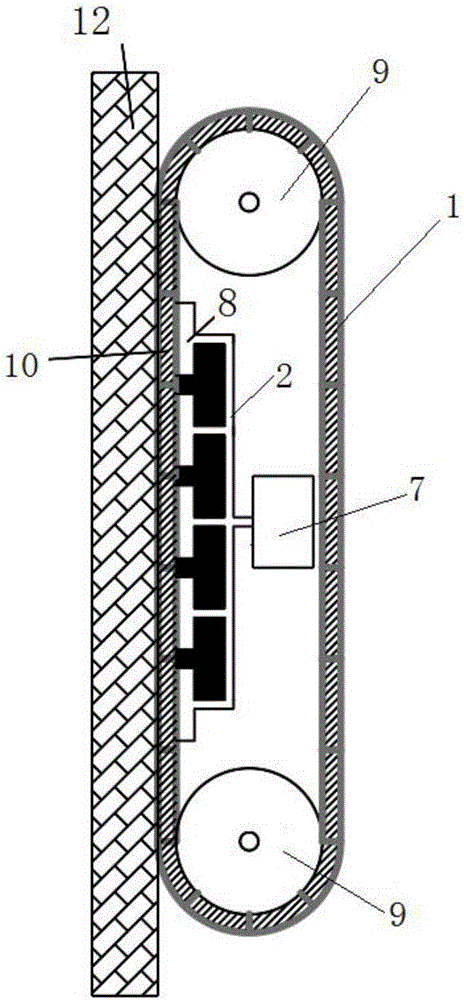
[0036] Such as figure 1 As shown, an adsorption wall-climbing robot for inspection of underwater caverns and steep walls includes an adsorption device for adsorbing the robot on the cave wall 12. The adsorption device includes an adsorption crawler 1, which is a whole non-splicing Plastic tracks. The inner side of the adsorption track 1 is in communication with the negative pressure chamber 2, and the negative pressure chamber 2 is connected with the water pump 7.
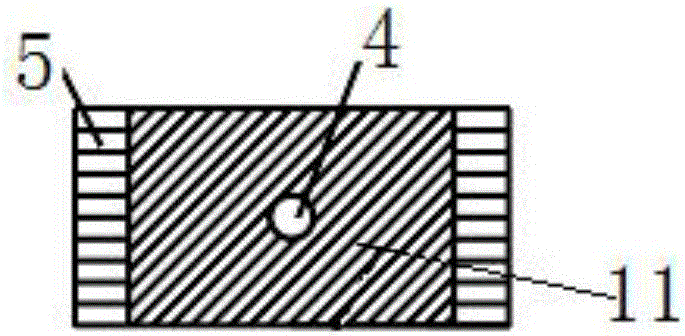
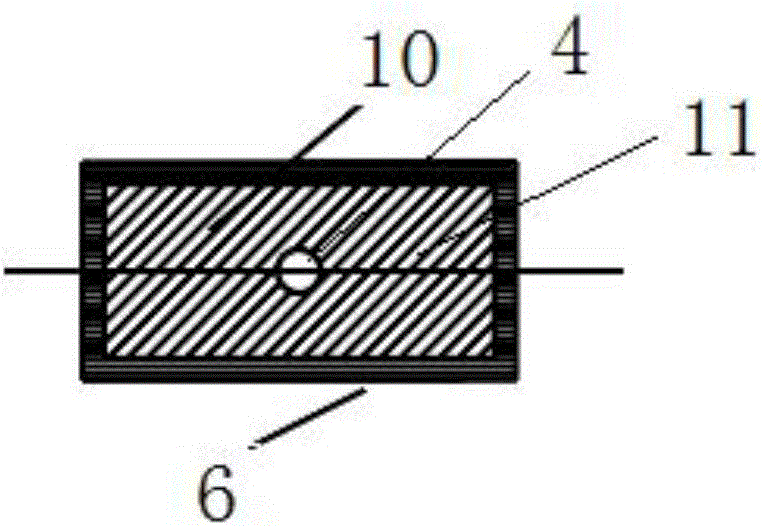
[0037] Such as figure 2 , 3 , 4 and 5, the adsorption track 1 includes several connected adsorption chamber units 10, the outer edge of the adsorption chamber unit 10 is provided with a closed adsorption skirt 6, the outline of the adsorption skirt 6 is rectangular, and the inner side of the adsorption skirt 6 is an adsorption Chamber 3, there is a smooth surface 11 inside the adsorption chamber 3, and there is a water absorption hole 4 on the smooth surface 10, the water absorption hole 4 communicates with the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More