

An indoor smoke environment image matching method suitable for fire fighting robots
A technology for fire-fighting robots and environmental images, which is applied in the field of computer vision and can solve problems such as unstable image matching algorithms and matching failures.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
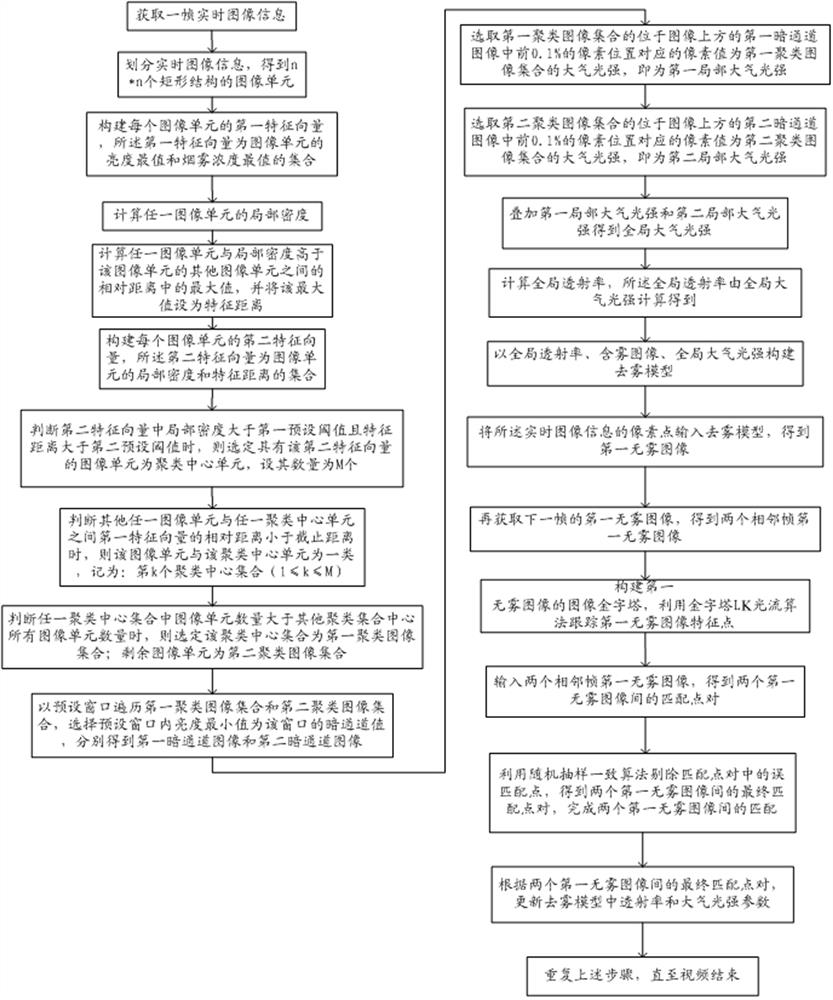
[0067] Please refer to figure 1 The shown application provides an indoor smoky environment image matching method suitable for fire extinguishing robots, including the following steps:
[0068] S1. Obtain a frame of real-time image information; collect real-time video images of the indoor smog environment through the camera on the platform, and extract any frame of real-time image information. Here, in order to ensure the processing speed, the resolution of the image should not be too high, for example, choose 640 *480 resolution;
[0069] Because the indoor smoke environment has the characteristics of multiple light sources and different smoke concentrations, the traditional image defogging algorithm is no longer applicable. This scheme divides the real-time image information to obtain n*n image units with a rectangular structure, which reduces the burden of multiple light sources. influences.
[0070] Construct the first eigenvector of each image unit, the first eigenvector...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More