Human body electromyographic signal direct-drive joint torque mapping method
A joint torque and electromyographic signal technology, applied in the field of exoskeleton robot auxiliary control, can solve the problems of complex model, discrete and cumbersome methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment 1
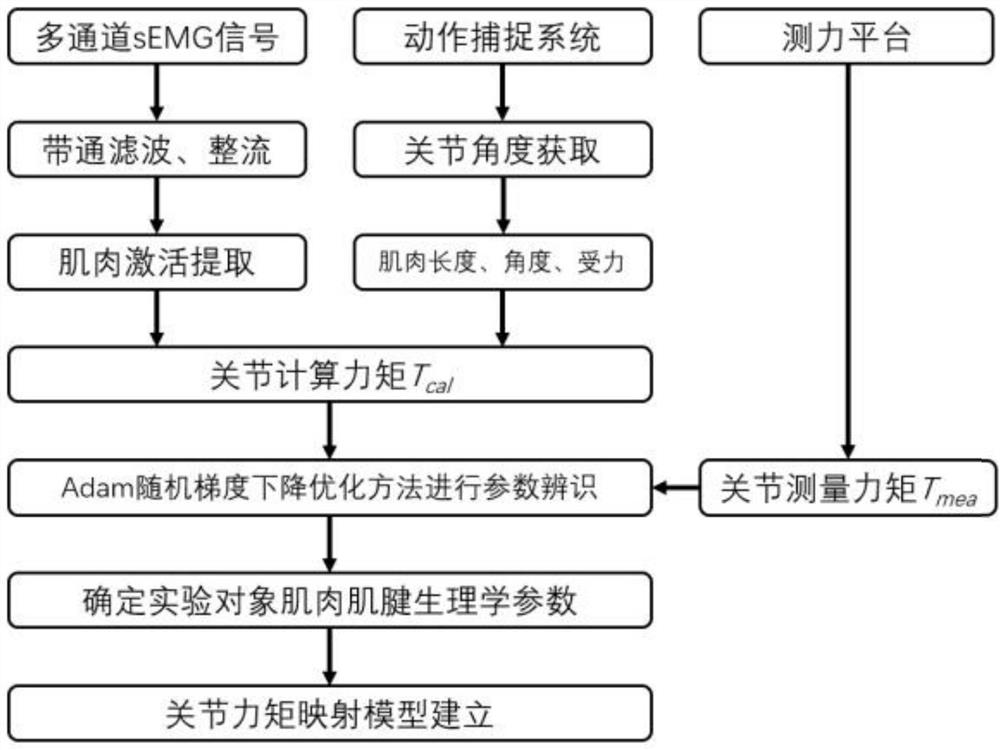
[0061] according to Figure 1 to Figure 2 As shown, the specific optimized technical solution adopted by the present invention to solve the above technical problems is: the present invention relates to a human body electromyographic signal direct drive joint torque mapping method.
[0062] A human body electromyographic signal direct drive joint torque mapping method, comprising the following steps:
[0063] Step 1: Perform nerve activation and muscle activation extraction to obtain nerve activation information;
[0064] Preferably, the step 1 is specifically:
[0065] The collected sEMG signal, extracting muscle activation from the sEMG signal;
[0066] After 50-500Hz band-pass filtering, rectification, and normalization, the neural activation information u(t) is determined according to:
[0067]
[0068] Among them, u(t) is the neural activation of the tth sampling point; α, β 1 ,β 2 is the neural activation coefficient; d is the time delay; T E is the sampling time...
specific Embodiment 2
[0111] Step 1: collect sEMG signals of human lower limbs and extract muscle activation information. The specific process is as follows:
[0112] The signal acquisition equipment adopts the Delsys Trigno EMG acquisition system, which includes a wireless communication base station and 16 wireless EMG electrodes, and each electrode has a built-in EMG signal collector. Delsys Trigno EMG acquisition system supports offline acquisition mode and online acquisition mode: in offline acquisition mode, the EMG signal is packaged and sent after the experiment is over, and in online acquisition mode, the length of a single transmission data is set. Whenever the EMG signal record length reaches The setpoint is transferred once. The surface skin of the vastus lateralis, vastus medialis, biceps femoris, semimembranosus, rectus femoris, lateral gastrocnemius and medial gastrocnemius of the test subject’s unilateral lower limbs was depilated and exfoliated, and then seven Delsys electrodes wer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More