

Mobile robot path planning method based on ray tracing
A mobile robot and path planning technology, applied in the field of mobile robots, can solve problems such as only considering continuity, limiting robot motion speed, reducing robot motion safety, etc., to achieve faster convergence speed, stable running time, and improved quality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention. It should be noted that the words "front", "rear", "left", "right", "upper" and "lower" used in the following description refer to the directions in the drawings, and the words "inner" and "outer ” refer to directions towards or away from the geometric center of a particular part, respectively.
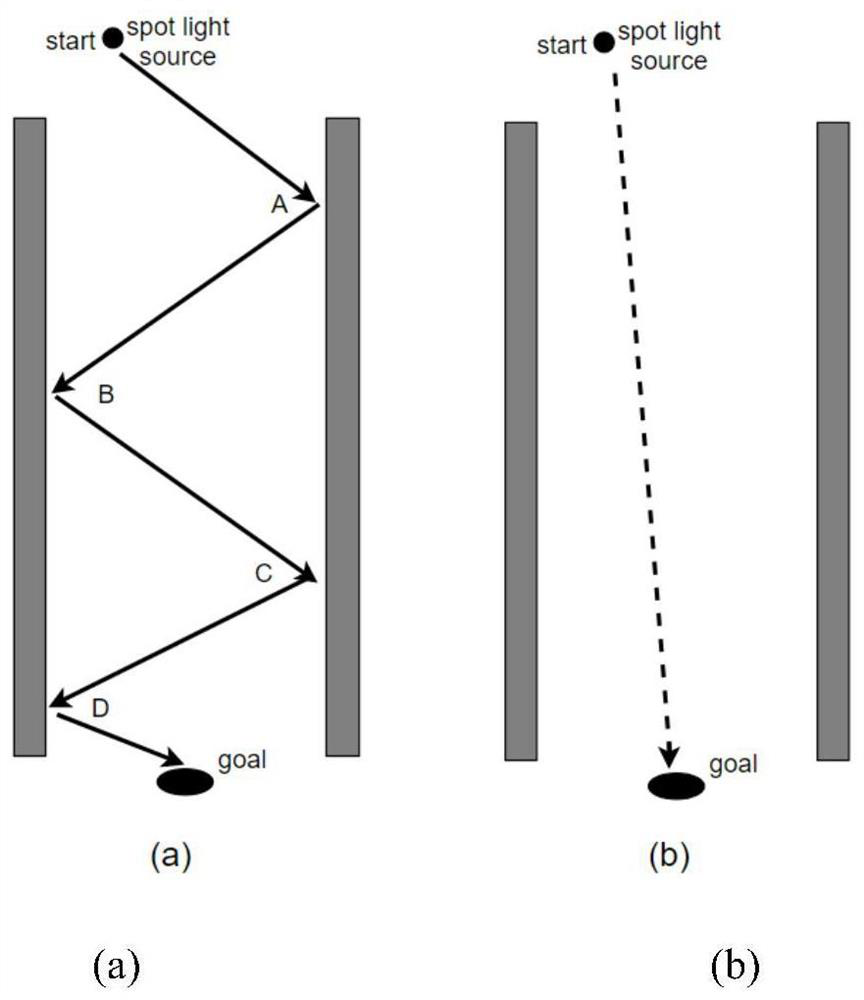
[0067] A path planning algorithm for a mobile robot based on light propagation in this embodiment, as shown in Figure 4, first initializes the number of light lines emitted by the starting point, and expands the target point to cover a certain area so that Light can be irradiated more easily, thereby speeding up the convergence speed of the algorithm; then in the light propagat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More