

Target trajectory discretization method, parking path tracking error optimization method and system
A target trajectory and path tracking technology, applied in the field of target trajectory discretization method, parking path tracking error optimization method and system, can solve problems such as lack of versatility, error processing optimization, etc., to achieve improved effect and experience, smooth rotation , Improve the effect of parking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with accompanying drawing.
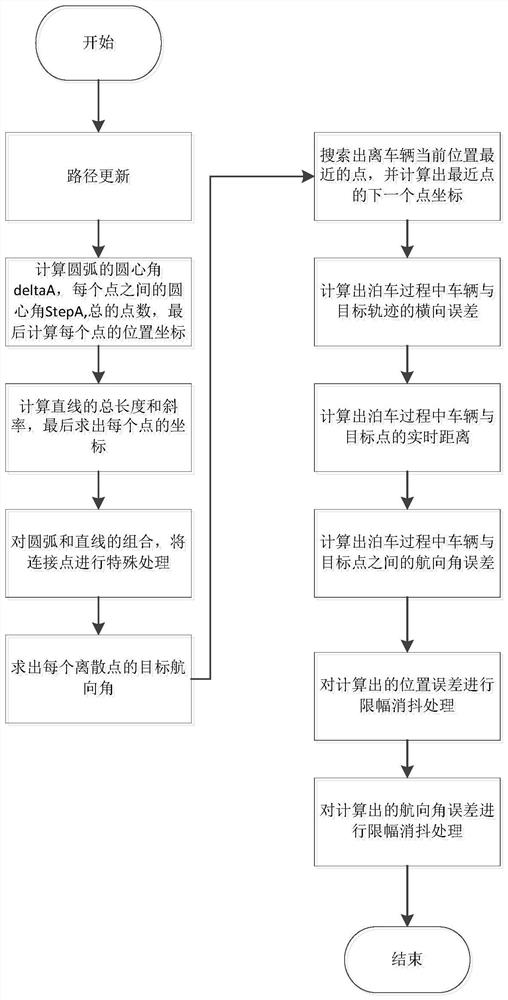
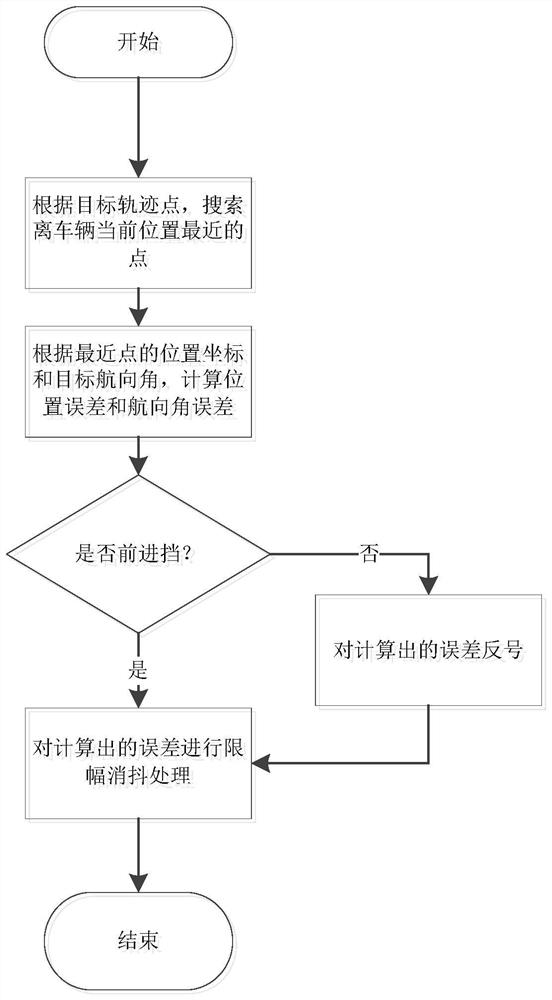
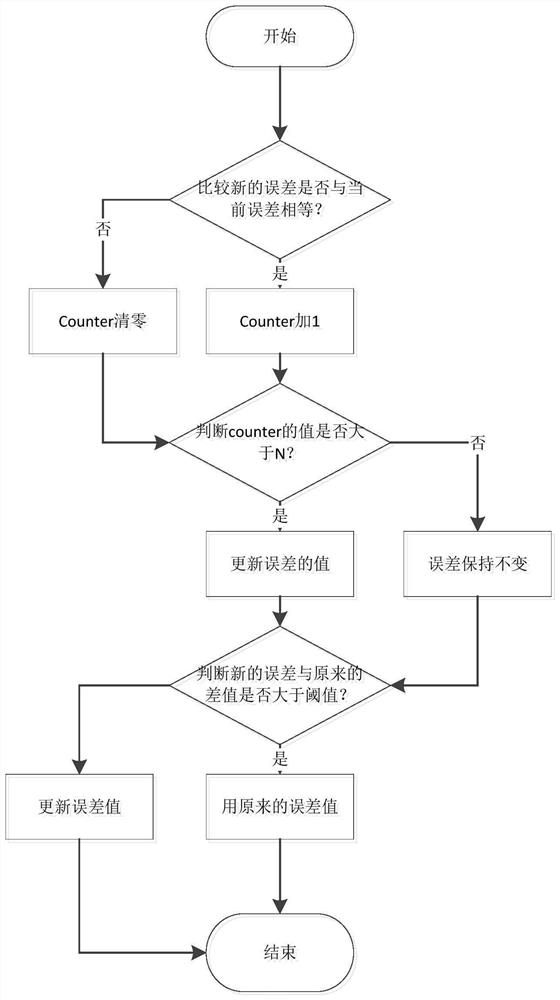
[0039] Such as Figure 1 to Figure 3 As shown, in this embodiment, the present invention provides a method for discretizing target trajectories, which specifically includes the following steps:
[0040] The trajectories output by path planning are discretized into points at equal intervals according to the preset distance (for example: 10cm, the preset distance can be adjusted appropriately according to the actual situation). The discretization rule is to discretize the path every update step, and each step supports a maximum trajectory distance of 16m, that is, there can be up to 160 points.
[0041] If the discrete trajectory is a circular arc, first use the arctangent function to calculate the central angle deltA that needs to be traversed based on the coordinates of the starting point, the ending point, and the center of the circle, and then calculate the center angle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More