

Automatic lane line extraction method and system based on region of interest
An area of interest, automatic extraction technology, applied in the area of interest-based automatic lane line extraction method and system field, can solve the problems that cannot be well adapted to the application scene of automatic driving, and the shortcomings of the lane line extraction method are obvious, so as to avoid The effect of manually modifying the threshold to ensure accuracy and security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
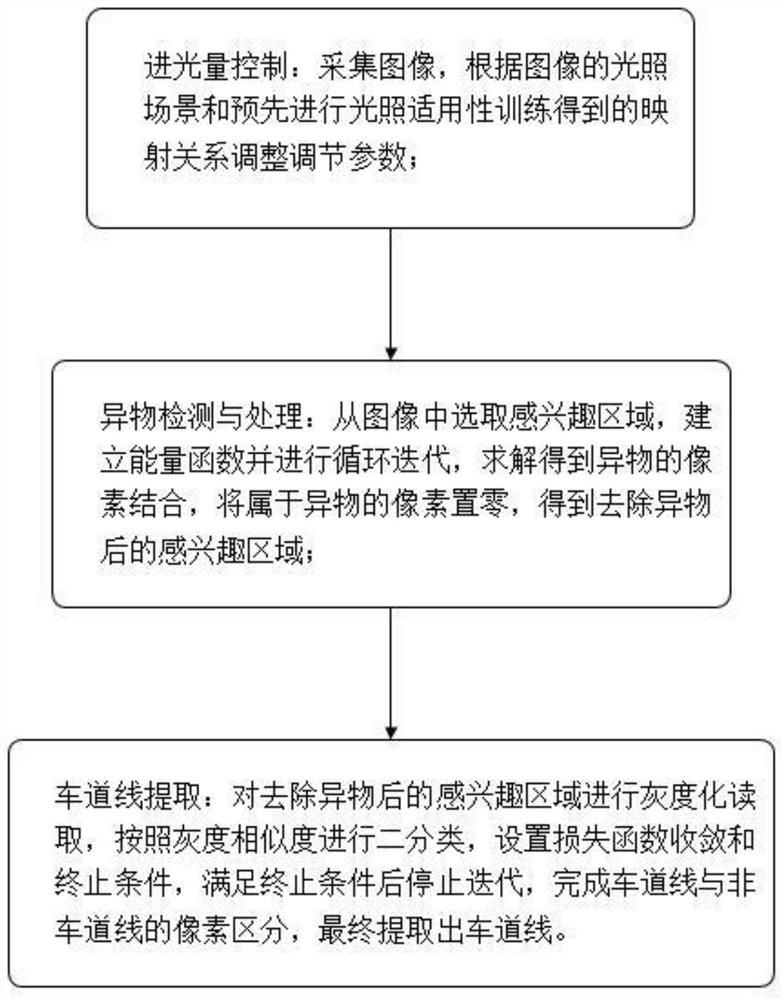
[0069] A method and system for automatically extracting lane lines based on an area of interest. The system includes a light input control module, a foreign object detection and processing module, and a lane line extraction module. In this embodiment, the Songling SCOUT_MINI mobile robot is used as an automatic driving chassis equipped with vision Sensors to build an experimental platform. Methods include such as figure 1 The following steps are shown:
[0070] Light input control: collect images, adjust the adjustment parameters according to the lighting scene of the image and the mapping relationship obtained from the pre-lighting applicability training;
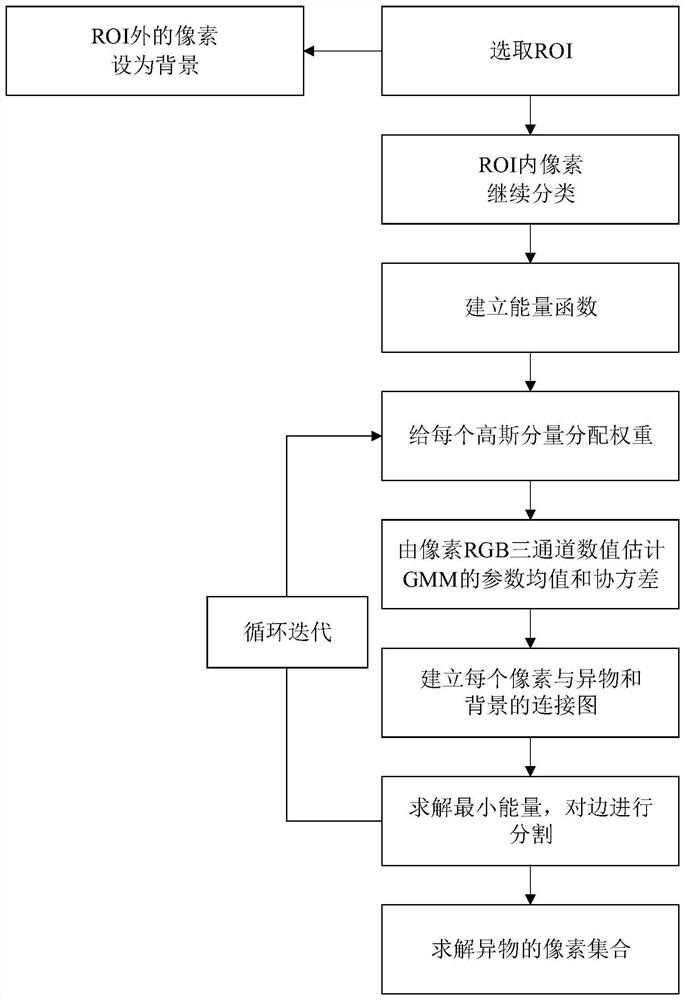
[0071] Foreign object detection and processing: select the region of interest from the image, establish an energy function and perform cyclic iterations, solve the pixel combination of foreign objects, set the pixels belonging to foreign objects to zero, and obtain the region of interest after removing foreign objects; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More