

A Semantic Segmentation Method for Street Scene Parsing for Autonomous Driving
A semantic segmentation and automatic driving technology, applied in the direction of instruments, biological neural network models, computing, etc., can solve the problems that affect the overall understanding and judgment, and cannot obtain long-distance context information, so as to improve the efficiency of semantic segmentation and reduce the amount of calculation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0055] like figure 2 and image 3A semantic segmentation method for street scene parsing for autonomous driving is shown, including the following steps:
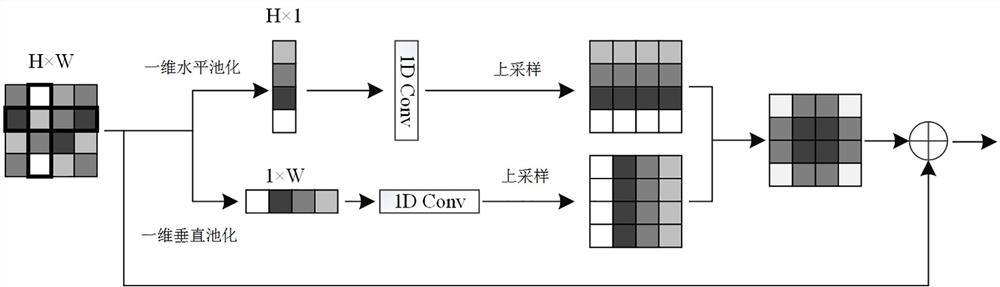
[0056] Constructing an image semantic segmentation network, the image semantic segmentation network is used to downsample the image to obtain an initial feature map, perform one-dimensional horizontal pooling on the initial feature map to obtain a first global feature map, and perform a one-dimensional horizontal pooling process on the initial feature map. The image is subjected to one-dimensional vertical pooling processing to obtain a second global feature map, and the first global feature map and the second global feature map are fused to generate an output image;
[0057] Collect training pictures, and use the training pictures to train the image semantic segmentation network;
[0058] Use the trained image semantic segmentation network to semantically segment the image to be processed;
[0059] Wherein, the one-dime...
Embodiment 2
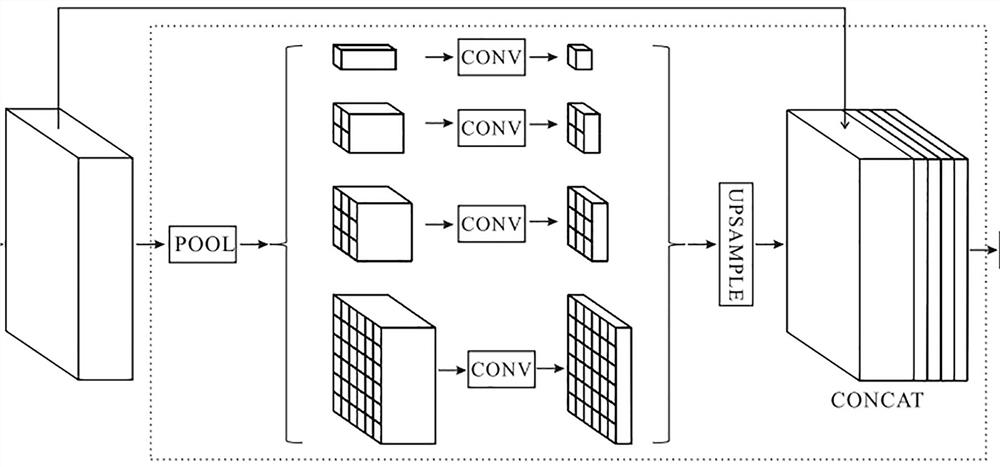
[0067] On the basis of Example 1, as Figure 4 As shown, the image semantic segmentation network performs pyramid pooling on the initial feature map to obtain a local feature map, fuses the local feature map, the first global feature map and the second global feature map, and generates an output image; the The pyramid pooling process includes paralleling at least two scales of small pooling layers to aggregate the regional features of the corresponding scales. Sampling and restoration to obtain local feature maps.
[0068] Preferably, as Figure 4 As shown, the pyramid pooling process parallelizes two scales of small pooling layers to aggregate regional features. In one or more embodiments, a two-dimensional conventional convolutional layer (2D Conv) is utilized to process and extract multi-scale feature information.
Embodiment 3
[0070] On the basis of the above-mentioned embodiment, as Figure 5 As shown in the figure, the high-level feature map and the low-level feature map are obtained after fusing each feature map, and the high-level feature map and the low-level feature map are weighted and added to generate the output image. In this embodiment, after the first, second, and third global feature maps and local feature maps are fused, weights are redistributed to the high-level features in the obtained high-level feature maps and the low-level features in the low-level feature maps, so that the same channel The weights of the high-level and low-level features are not necessarily equal, and then the weighted high-level feature maps and low-level feature maps are added and fused to achieve the complementary fusion of high-level and low-level features in terms of semantics and details. like Figure 7 As shown, in the FFM module, after the weighted high-level feature map and low-level feature map are a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More