A three-dimensional positioning synchronous tracking camera system and control method
A synchronous tracking and three-dimensional positioning technology, which is applied in the parts of the TV system, image communication, TV and other directions, can solve the problems such as the inaccurate return of the observed object, the inaccurate variable-speed tracking of the camera system, and the low protection ability of the camera system. , to achieve the effect of low cost, low delay and high protection level
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
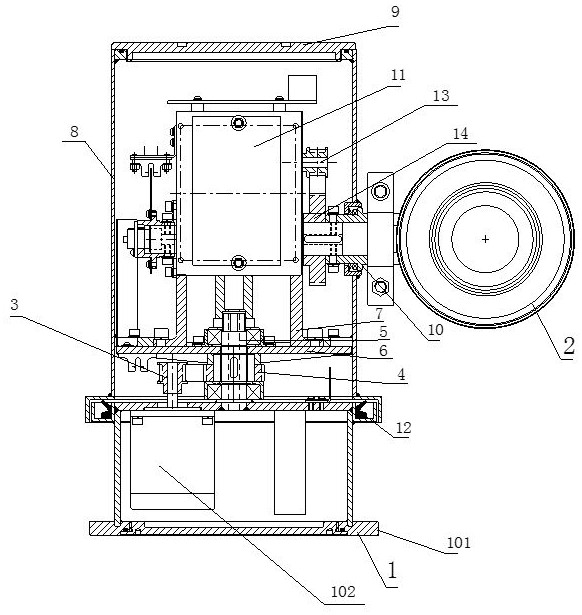
[0076] A three-dimensional positioning synchronous tracking camera system, comprising: a three-dimensional positioning synchronous tracking control board 11, a camera device 2, and a three-dimensional positioning synchronous tracking pan-tilt device 1;
[0077] The 3D positioning synchronous tracking control board 11 and the camera device 2 are both installed on the 3D positioning synchronous tracking PTZ device 1;
[0078] The three-dimensional positioning synchronous tracking pan-tilt includes a rotating disk 6 and a first drive assembly for driving the rotating disk 6 to rotate. The three-dimensional positioning synchronous tracking control board 11 and the camera device 2 are both mounted on the rotating disk 6 through the motor bracket 7;
[0079] The camera device 2 is rotatably mounted on the rotary disk 6 through the second drive assembly.
[0080] The three-dimensional positioning synchronous tracking pan / tilt also includes a lower fixed shell 101 , the first drive as...
Embodiment 2
[0118] like Figures 10 to 12 As shown, a three-dimensional positioning synchronous tracking camera control method includes the following steps:
[0119] S1, according to the three-dimensional coordinates of the tracking camera and the three-dimensional coordinates of the tracked object, calculate the focal length of the tracked object and the single image of the tracking camera;
[0120] S2. According to the focal length of the single-fold image, calculate the zoom value that tracks the change of the camera, and then calculate the coordinate value of the zoom motor corresponding to the zoom value;
[0121] S3, according to the current coordinate value of the zoom motor of the tracking camera, calculate the difference between the predetermined coordinate and the current coordinate of the zoom motor, and calculate the speed of the gimbal according to the difference;
[0122] S4. Calculate the vertical and horizontal angles according to the three-dimensional coordinates of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More