

Path determination method and device
A path determination and target path technology, applied in two-dimensional position/channel control and other directions, which can solve the problems of long time, slow path planning, and large number of target path searches.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
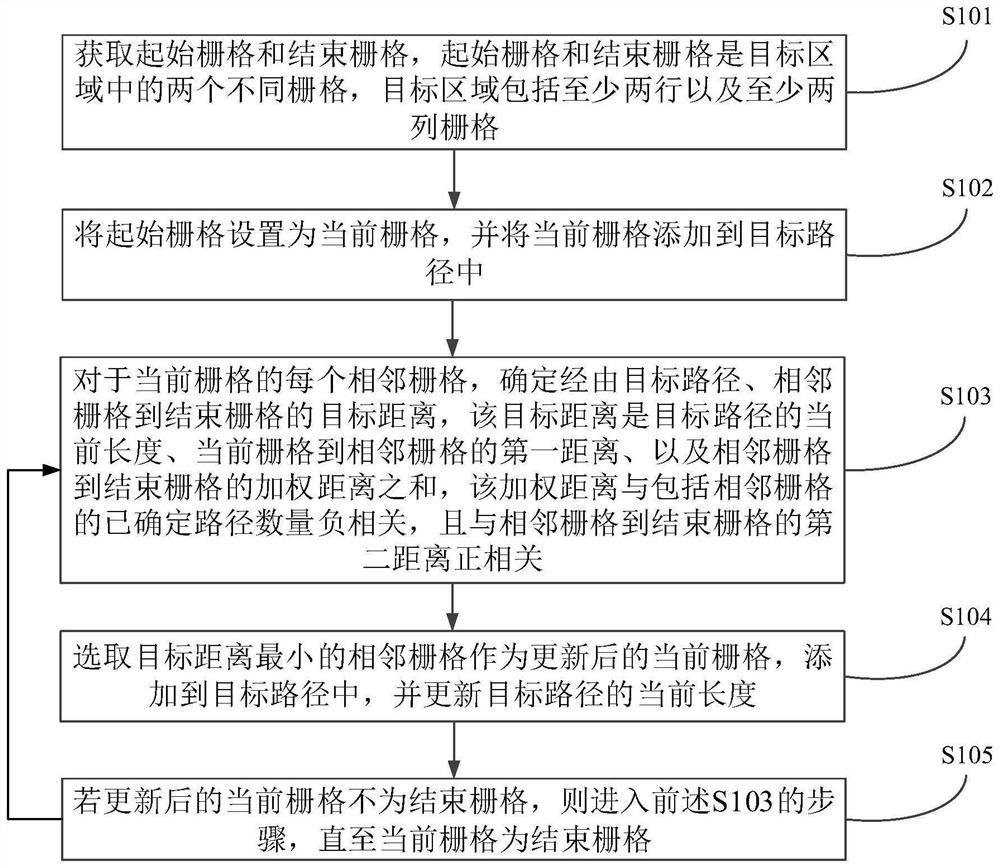
[0031] In order to make the purposes, technical solutions and advantages of the embodiments of the present disclosure clearer, the technical solutions in the embodiments of the present disclosure will be described clearly and completely below with reference to the accompanying drawings in the embodiments of the present disclosure. Obviously, the described embodiments These are some, but not all, embodiments of the present disclosure. Based on the embodiments in the present disclosure, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present disclosure.
[0032] As described in the background art, the number of searches for determining the target path in the prior art is relatively large, so that path planning takes a long time. According to the research of the inventor, the reason for this problem is that when selecting the next grid to be added to the target path from multiple adjacent ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More