

A UAV multi-stage visual precision landing method and device
A UAV, multi-stage technology, applied in 3D position/course control, vehicle position/route/height control, instruments, etc., can solve the problem of inability to achieve a large landing height, accurate landing, safe landing, UAV landing target Point detection and positioning failure, hidden dangers of safe landing and other problems, to achieve the effect of low cost, convenient operation and strong generalization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following description of at least one exemplary embodiment is merely illustrative in nature and is in no way intended to limit the invention, its application, or uses. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
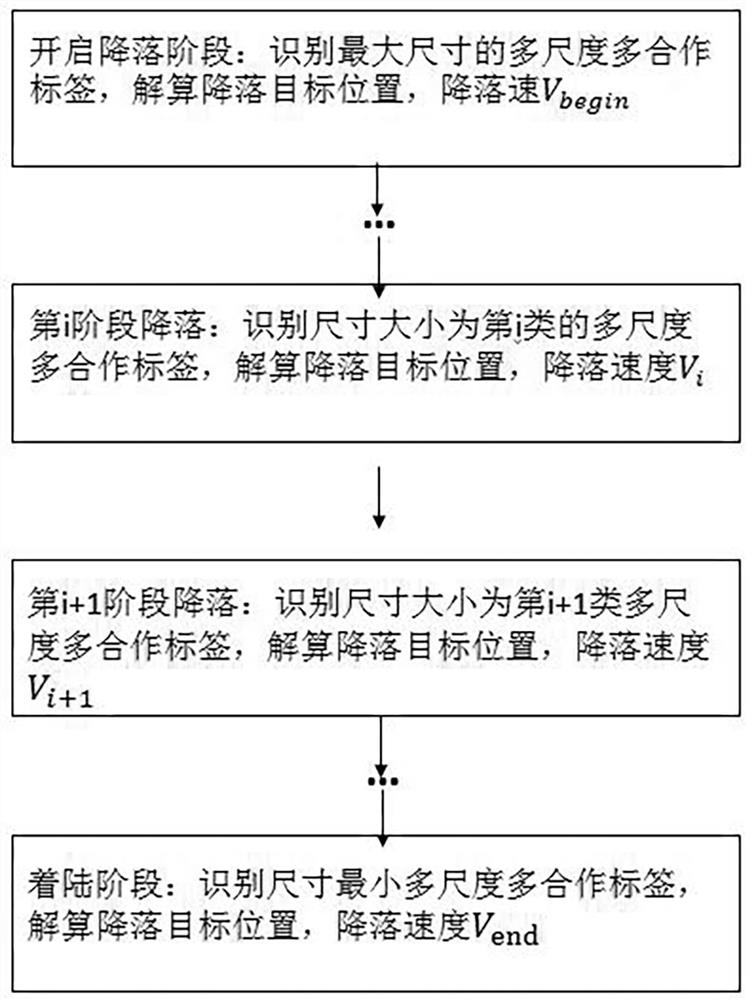
[0030] A multi-stage visual precision landing method for an unmanned aerial vehicle, comprising the following steps:
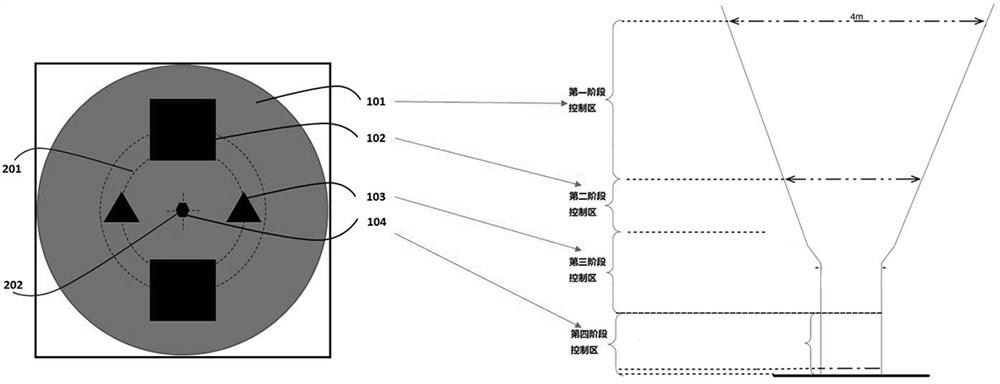
[0031] Step S1: Obtain the internal parameters of the airborne bird's-eye view camera and the actual landing height requirement of the UAV, and construct a ground visual landing sign with multi-scale and multi-cooperative labels;
[0032] The multi-scale multi-cooperation tags include multi-scale tags and multi-cooperation tags, the multi-cooperation tags are tags with different shapes, and each type of the multi-cooperation tags corresponds to a landing stage; the multi-scale...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More