

Depth detection method for semi-submersible navigation body
A technology for depth detection and flying objects, applied in height/horizontal measurement, measuring devices, surveying and navigation, etc., can solve problems such as huge amount of calculation, complex and changeable environment, complex and various parameters, etc., and achieve simple design parameters and high discreteness Low, eliminate the effect of wave high frequency and the effect of
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in detail below with reference to the accompanying drawings and examples.
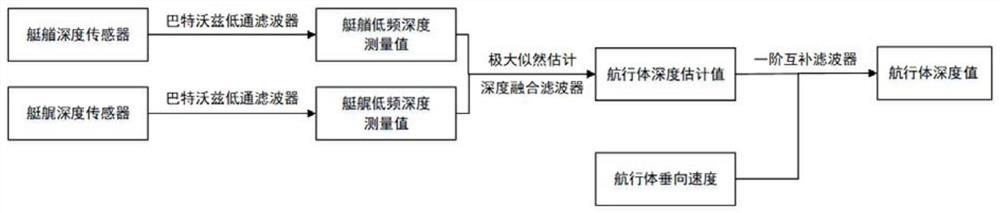
[0050] This embodiment provides a method for detecting the depth of a semi-submersible vehicle, see the attached figure 1 ,Specific steps are as follows:
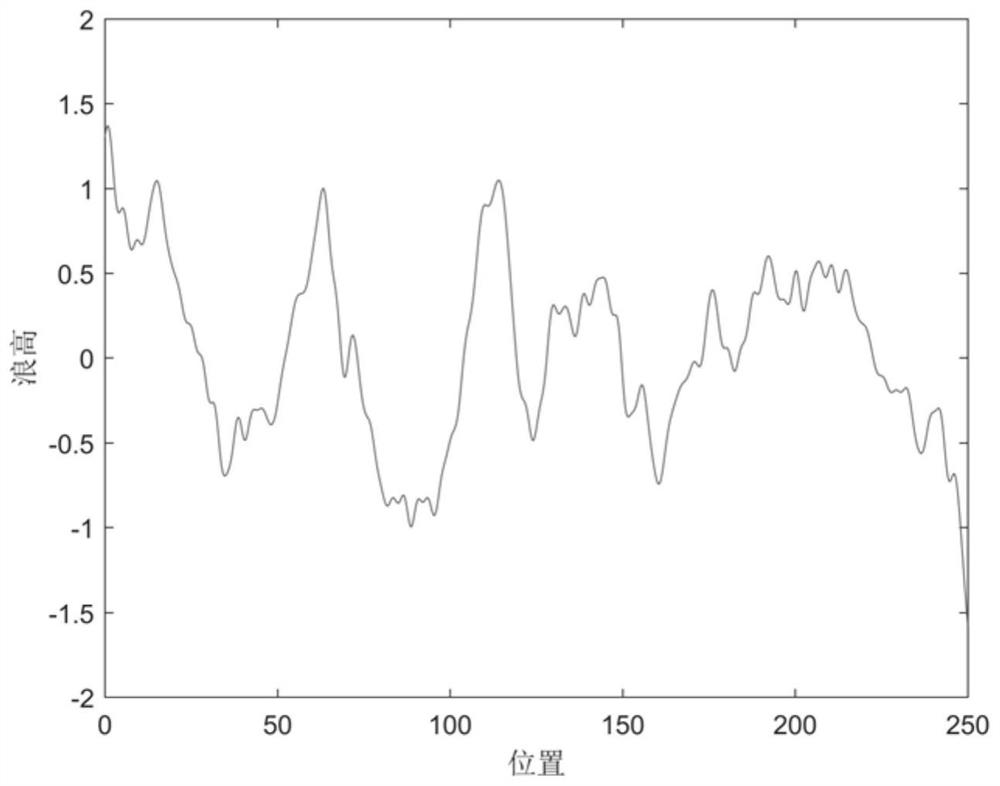
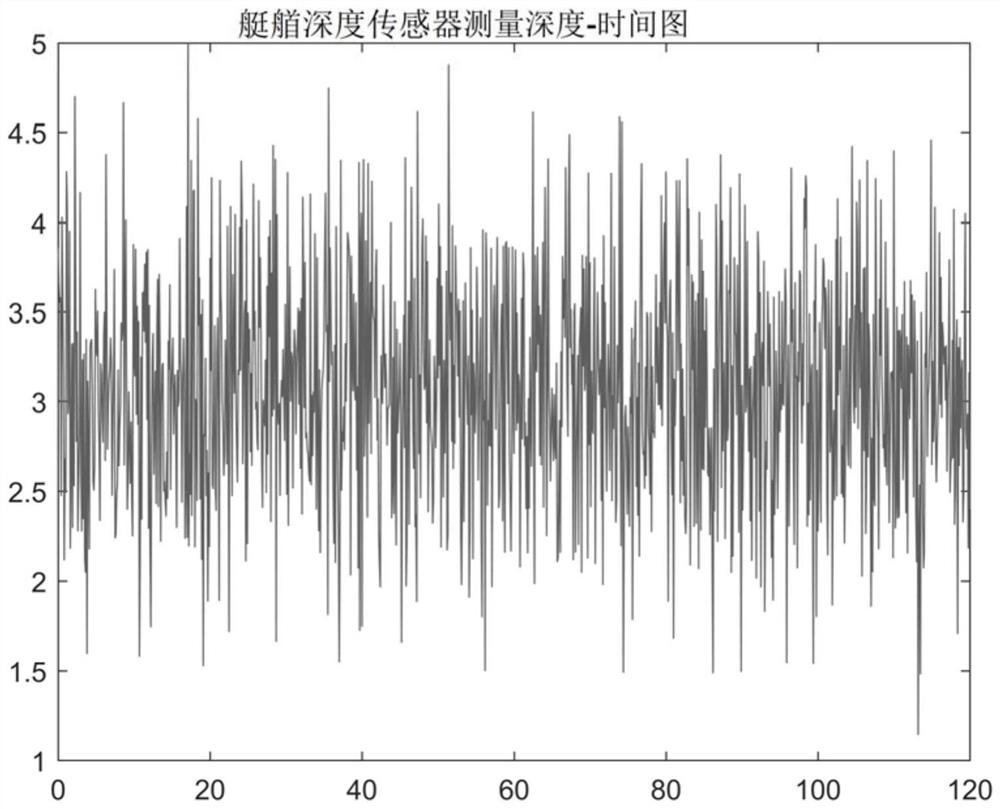
[0051] Step 1, install two depth sensors on the bow and stern of the vehicle respectively. The two depth sensors are the bow depth sensor and the stern depth sensor respectively. The bow depth sensor collects the bow depth data of the vehicle. The stern depth sensor collects the stern depth data of the vehicle, as shown in the attached Figure 3-4 shown;
[0052] Step 2. Construct the wave low-pass filter, that is, construct two identical Butterworth low-pass filters, the two Butterworth low-pass filters are the bow Butterworth low-pass filter and the stern Butterworth low-pass filter Low-pass filter, the bow Butterworth low-pass filter performs low-pass Butterworth filtering on the bow depth data, e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More