Four-flexible-cable traction parallel actuator motion attitude control method based on rope length prediction
A technology of a flexible cable traction and control method is applied in the field of motion attitude control to achieve the effects of improving the visual experience, solving the problem of low control accuracy and improving the control accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0058] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention.
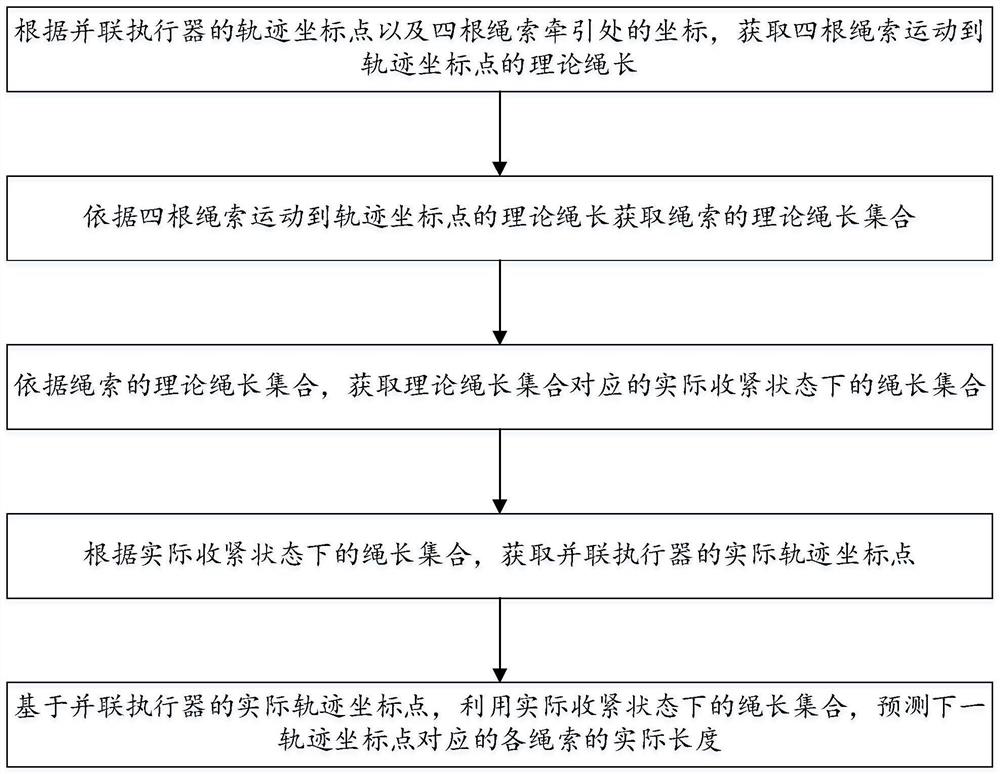
[0059] like figure 1 As shown, in this embodiment, a method for controlling the motion attitude of four flexible rope traction parallel actuators based on the predicted rope length is provided, including the following steps,
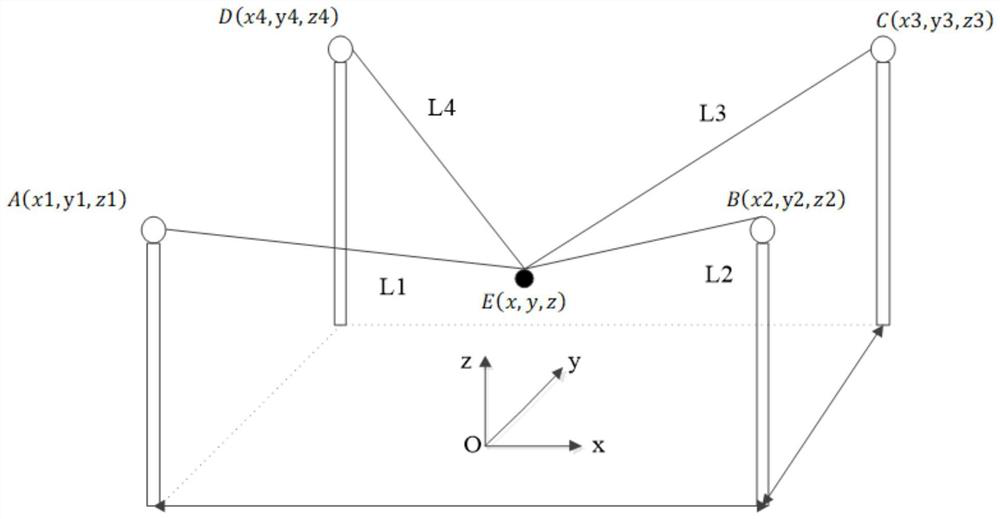
[0060] S1. According to the trajectory coordinate points of the parallel actuator and the coordinates of the traction points of the four ropes, obtain the theoretical length of the ropes moving from the four ropes to the trajectory coordinate points;
[0061] S2. Obtain the theoretical rope length set of the ropes according to the theoretical rope lengths of the four ropes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



