Full-speed-range ACC car following control method and system
A control method and technology of a control system, applied in the field of automobiles, can solve the problems of poor riding comfort and driving stability, unable to follow the car very stably, etc., so as to improve the riding comfort and driving stability, improve the control effect, widen The effect of the application foreground
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example ;
[0048] The present invention provides a full speed domain ACC car following control method, comprising the following steps:
[0049] S1, acquiring target vehicle motion information and self-vehicle motion information;
[0050] S2, performing acceleration efficiency compensation processing and braking efficiency compensation processing;
[0051] S3, processing the response delay of the brake actuator: predict the longitudinal velocity of the own vehicle, the longitudinal velocity of the target vehicle, and the longitudinal relative distance between the own vehicle and the target vehicle within the delay time according to the response delay time of the driving brake actuator;
[0052] S4, calculate and obtain the expected acceleration of the own vehicle according to the predicted longitudinal velocity of the own vehicle, the longitudinal velocity of the target vehicle, the longitudinal relative distance between the own vehicle and the target vehicle, and the longitudinal acceler...
no. 2 example ;
[0058] The present invention provides a full speed domain ACC car following control method, comprising the following steps:
[0059] S1, acquiring target vehicle motion information and self-vehicle motion information;
[0060] The target vehicle motion information includes the longitudinal velocity of the target vehicle, the longitudinal acceleration of the target vehicle, and the longitudinal relative distance between the self-vehicle and the target vehicle;
[0061] The vehicle motion information includes the vehicle acceleration calculated according to the vehicle speed and the expected acceleration of the vehicle at the previous moment; the above information can be obtained by the on-board sensor according to the existing technology;
[0062] S2, performing acceleration efficiency compensation processing and braking efficiency compensation processing;
[0063] The acceleration efficiency compensation process includes: compensating the difference between the actual acceler...
no. 3 example ;
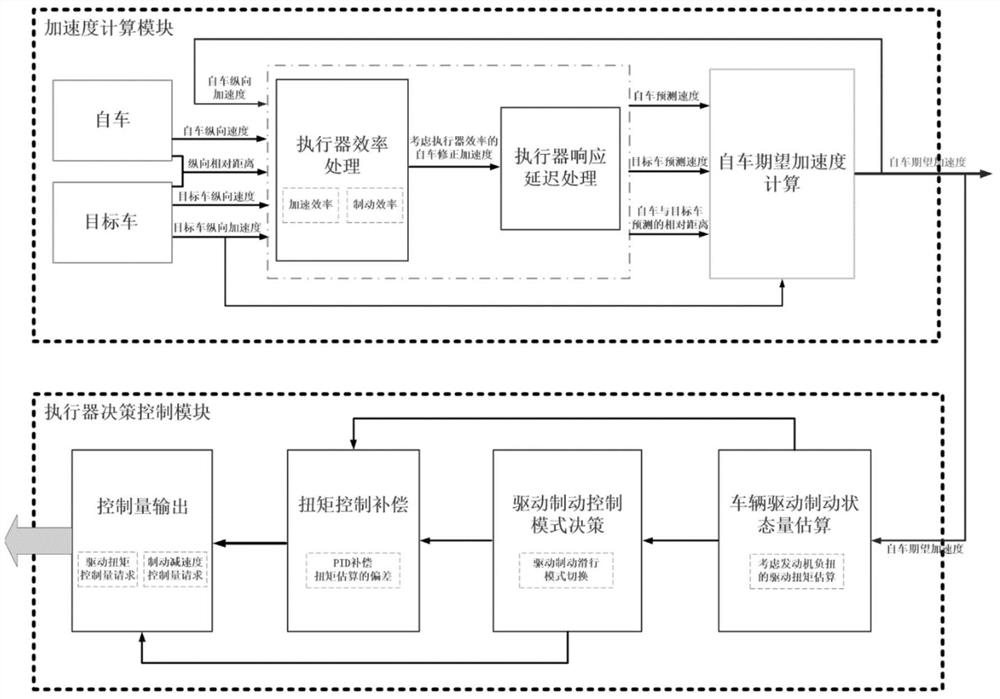
[0073] The present invention provides a full-speed domain ACC car following control system, including:
[0074] Acceleration calculation module, which acquires the target vehicle motion information and the self-vehicle motion information to perform acceleration efficiency compensation processing and braking efficiency compensation processing, and predicts the longitudinal velocity of the own vehicle, the longitudinal velocity of the target vehicle and the The longitudinal relative distance between the vehicle and the target vehicle is calculated to obtain the expected acceleration of the vehicle;
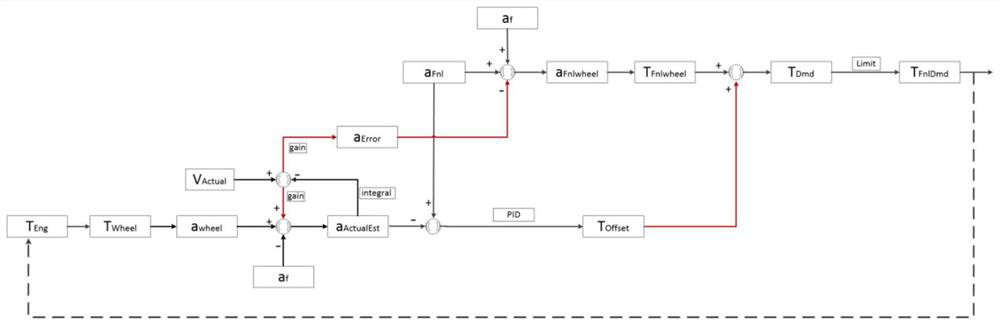
[0075] Actuator decision-making control module, which calculates the engine torque feedforward control amount, wheel end torque feedforward control amount and driving and braking response switching characteristic quantity, makes driving and braking control decisions, and compensates for the lack of vehicle wheel end torque feedforward control amount , and the output drive torque con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com