

Unified interactive robot multi-task learning method based on attention mechanism
A multi-task learning and attention technology, applied in the field of artificial intelligence, can solve problems such as unfriendliness, high reasoning delay, negative impact of real-time interactive experience, etc., and achieve the effect of interactive intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
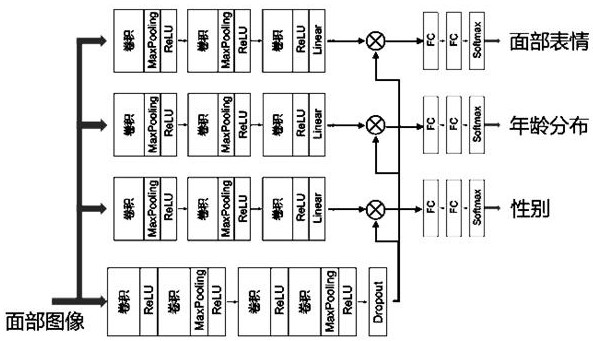
[0035] refer to figure 1 , a unified attention mechanism-based multi-task learning method for interactive robots, including the following steps:
[0036] S1. Use deep learning programming frameworks such as TensorFlow or PyTorch to build a model architecture. The basic operation of the attention mechanism is matrix multiplication. The specific implementation method is as follows:
[0037] Mark the feature map output by the feature extractor as F1 and convert it into a feature matrix in spatial order and record it as M1. The dimension of M1 is C rows and W*H columns, where C is the number of channels of F1, and W and H are F1 respectively. width and height;
[0038] In the same way, the feature maps output by the three local networks are recorded as F2, F3, and F4, respectively, and converted into three feature matrices, which are respectively recorded as M2, M3, and M4;
[0039] The number of channels of the feature map output by the feature extractor and the local network i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More