Crane path planning method based on improved A* algorithm
A path planning, crane technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, instruments, etc., can solve problems such as reduced search efficiency, increased search time, increased computational memory, and increased computational load. , to achieve the accurate effect of the map
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be discussed in further detail below in conjunction with the accompanying drawings and specific embodiments.
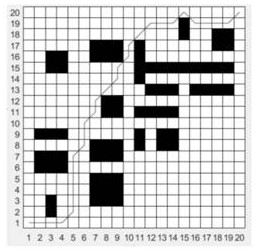
[0022] The present invention is applicable to the crane path planning based on the A* algorithm under the grid map. Firstly, the grid method is used to establish the crane operating environment map; secondly, the improved A* algorithm is used to search for the initial path; finally, the initial path is smoothed, get the final path. Specific steps are as follows:
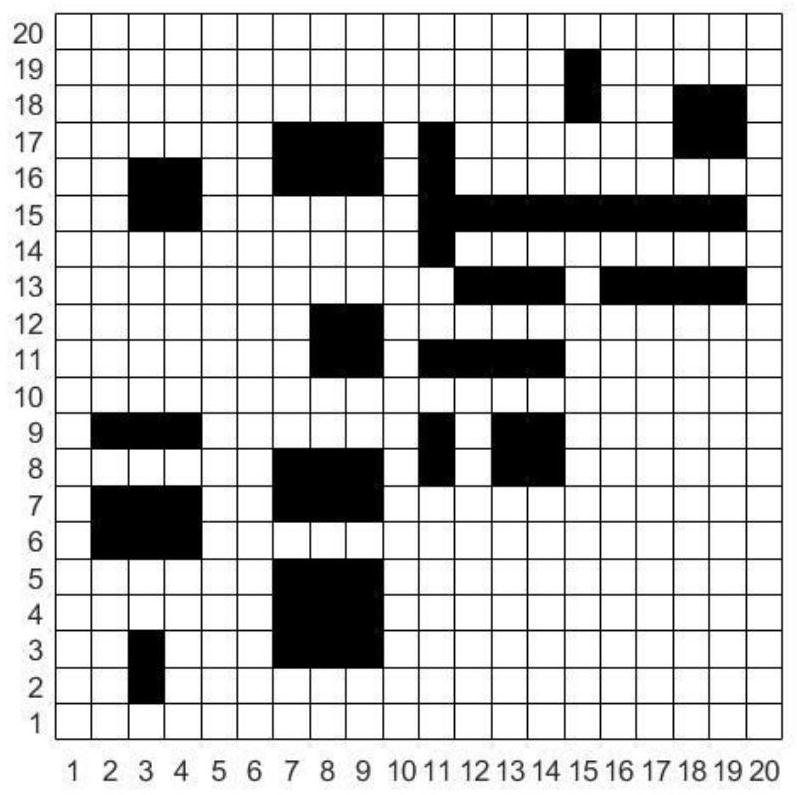
[0023] Step 1. Use the binocular vision sensor to model the working environment of the crane, expand the obstacles in the search area, and establish a grid map of the robot's operating environment, as shown in figure 2 shown;
[0024] Step 2, determine the starting point and end point of the robot search path;
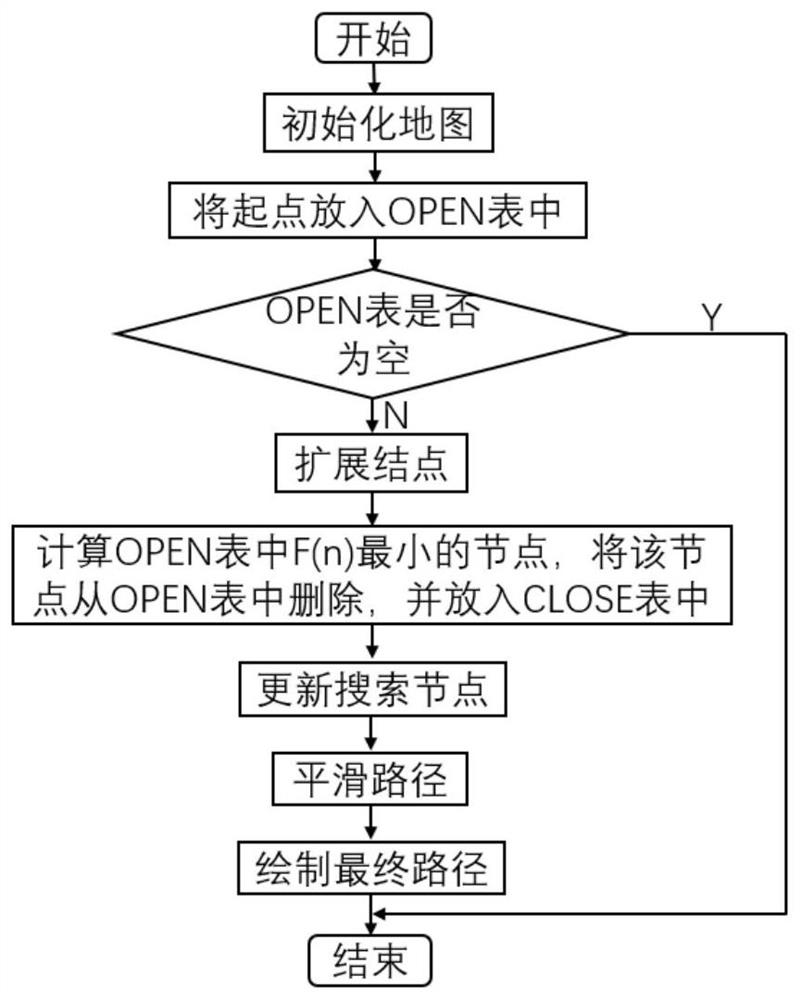
[0025] Step 3. Create two linked lists to store the nodes to be detected and the detected nodes respectively: create the OPEN linked list and the CLOSE linked li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com